Product Description
Advance 120C Light High Speed Marine Gearbox for Boats
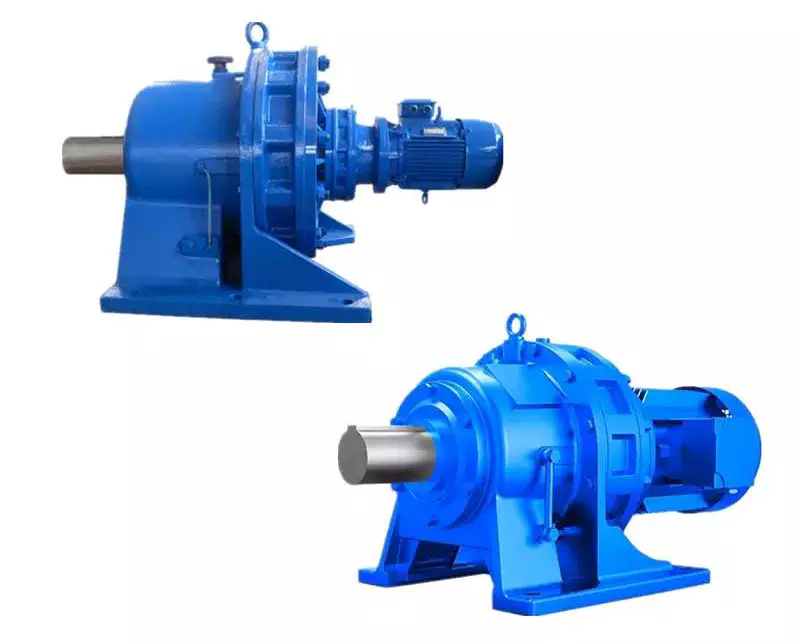
120C marine gearbox possesses functions of speed reduction, ahead and astern, clutching and de-clutching, and bearing propeller thrust. Featuring in compact in structure, small in volume and light in weight, it can match high-speed engine to form ship power unit.
120C marine gearbox is suitable for small and medium boats such as yacht, traffic, passenger and cargo boats.
| Input speed | 1000-2500r/min | ||
| Reduction ratio | 1.48,1.94,2.45 | Trans. capacity | 0.10kw/r/min |
| 2.96 | 0.09kw/r/min | ||
| 3.35 | 0.08kw/r/min | ||
| Control way | Push-and-pull flexible shaft, electrically | ||
| Rated thrust | 25KN | ||
| Center distance | 180mm | ||
| L×W×H | 432×440×650mm | ||
| Net weight | 225kg | ||
| Flywheel | 6135Ca,SAE14,11.5 | ||
| Bell housing | 6135Ca,SAE1,2,3 | ||
HCQ/HCA/HCM/HCV series light high-speed marine gearboxes self-developed by the company are designed of power ranging 20kW~2300kW, ratio ranging 1.5~3.5:1 and complete in specifications. Product with ‘Q’ in code is with cast iron housing, with ‘M’ aluminum housing and with ‘A’ and ‘V’ with down angle transmission structure. These products enjoy high market share, are widely used on various yacht, traffic boat, passenger boat. Product design and manufacturing capability are in national leading and international advanced level. Main features: 1. Possess functions of clutch & de-clutching, speed reduction and bearing propeller thrust; 2. Compact in structure, small in volume and light in weight; 3. High rated input speed and high manufacturing precision; 4. Good complete-machine performance, low noise and small vibration; 5. Match high-speed diesel engine, mainly used on medium-to-small high-speed boats; 6. Apply mechanical and automatic control, realizing local emergent control and remote control of the gearbox.
ADVANCE HCD800 – 3,429:1
MEDIUM/HEAVY DUTY GEARBOX
| Reference number | A-HCD800-3,429 |
| Brand | Advance |
| Model | HCD800 |
| Ratio | 3,429:1 |
| Power | 1530 HP @ 1800 RPM |
| Max. Power | 1530 HP @ 1800 RPM |
| RPM Range | 1000-1800 |
| Rated propeller thrust | 110 kn |
| N/n | 0,85 hp/rpm |
FEATURES & OPTIONS
| Sae housing | Without/sae-00 |
| Controls | Mechanical |
| Pto | Not available |
| Coupling size | 21 /18 inch |
| Coupling type | Rubber block drive, with alu. ring |
DIMENSIONS
| Vertical offset | 450 mm |
| LxWxH | 1056x1280x1341 mm |
| Net. weight | 2200 kg |
AVAILABLE ARRANGEMENTS
| Ratio | 3,96:1 | 3,429:1 | 4,167:1 | 4,391:1 | 4,905:1 | 5,474:1 | 5,889:1 |
| Rate | 0,85 hp/rpm | 0,80 hp/rpm | 0,75 hp/rpm | 0,70 hp/rpm | |||
ADVANCE 135A – 5,06:1
MEDIUM/HEAVY DUTY GEARBOX
| Reference number | A-135A-5,06 |
| Brand | Advance |
| Model | 135A |
| Ratio | 5,06:1 |
| Power | 212,4 HP @ 1800 RPM |
| Max. Power | 236 HP @ 2000 RPM |
| RPM Range | 1000-2000 |
| Rated propeller thrust | 29,4 kn |
| N/n | 0,118 hp/rpm |
FEATURES & OPTIONS
| Sae housing | Without/sae-1 |
| Controls | Mechanical/ electrical |
| Pto | Not available |
| Coupling size | 14 inch |
| Coupling type | Rubber block drive, with alu. ring |
DIMENSIONS
| Vertical offset | 225 mm |
| LxWxH | 578x744x830 mm |
| Net. weight | 470 kg |
AVAILABLE ARRANGEMENTS
| Ratio | 2,03:1 | 2,59:1 | 3,04:1 | 3,62:1 | 4,11:1 | 4,65:1 | 5,06:1 | 5,47:1 | 5,81:1 |
| Rate | 0,134 hp/rpm | 0,125 hp/rpm | 0,118 hp/rpm | 0,103 hp/rpm | 0,094 hp/rpm | ||||
ADVANCE HCD600A – 5,44:1
MEDIUM/HEAVY DUTY GEARBOX
| Reference number | A-HCD600A-5,44 |
| Brand | Advance |
| Model | HCD600A |
| Ratio | 5,44:1 |
| Power | 972 HP @ 1800 RPM |
| Max. Power | 1134 HP @ 2100 RPM |
| RPM Range | 1000-2100 |
| Rated propeller thrust | 90 kn |
| N/n | 0,54 hp/rpm |
FEATURES & OPTIONS
| Sae housing | Without/sae-00 |
| Controls | Mechanical |
| Pto | Not available |
| Coupling size | 21 /18 /14 inch |
| Coupling type | Rubber block drive, with alu. ring/(high) flexible coupling |
DIMENSIONS
| Vertical offset | 415 mm |
| LxWxH | 745x1094x1271 mm |
| Net. weight | 1550 kg |
AVAILABLE ARRANGEMENTS
| Ratio | 3,32:1 | 4,7:1 | 4,18:1 | 4,43:1 | 5,44:1 | 5,71:1 | 5:1 |
| Rate | 0,65 hp/rpm | 0,62 hp/rpm | 0,54 hp/rpm | 0,6 hp/rpm | |||
ADVANCE HC400 – 4,06:1
MEDIUM/HEAVY DUTY GEARBOX
| Reference number | A-HC400-4,06 |
| Brand | Advance |
| Model | HC400 |
| Ratio | 4,06:1 |
| Power | 684 HP @ 1800 RPM |
| Max. Power | 684 HP @ 1800 RPM |
| RPM Range | 1000-1800 |
| Rated propeller thrust | 82 kn |
| N/n | 0,38 hp/rpm |
FEATURES & OPTIONS
| Sae housing | Without/sae-0/sae-1 |
| Controls | Mechanical/ electrical |
| Pto | Not available |
| Coupling size | 18 /16 /14 inch |
| Coupling type | Rubber block drive, with alu. ring/(high) flexible coupling |
DIMENSIONS
| Vertical offset | 264 mm |
| LxWxH | 843x950x890 mm |
| Net. weight | 820 kg |
AVAILABLE ARRANGEMENTS
| Ratio | 1,5:1 | 1,77:1 | 2,04:1 | 2,5:1 | 3,25:1 | 3,38:1 | 3,42:1 | 3:1 | 4,06:1 | 4,61:1 | 4,94:1 |
| Rate | 0,45 hp/rpm | 0,38 hp/rpm | 0,25 hp/rpm | ||||||||
ADVANCE D300A – 4:1
MEDIUM/HEAVY DUTY GEARBOX
| Reference number | A-D300A-4 |
| Brand | Advance |
| Model | D300A |
| Ratio | 4:1 |
| Power | 630 HP @ 1800 RPM |
| Max. Power | 805 HP @ 2300 RPM |
| RPM Range | 1000-2300 |
| Rated propeller thrust | 60 kn |
| N/n | 0,35 hp/rpm |
FEATURES & OPTIONS
| Sae housing | Without/sae-0/sae-1 |
| Controls | Mechanical/ electrical |
| Pto | Available |
| Note | If using flexible couping, rate will rise 8% |
| Coupling size | 18 /16 /14 inch |
| Coupling type | Rubber block drive, with alu. ring/(high) flexible coupling |
DIMENSIONS
| Vertical offset | 355 mm |
| LxWxH | 786x920x1040 mm |
| Net. weight | 940 kg |
AVAILABLE ARRANGEMENTS
| Ratio | 4,48:1 | 4:1 | 5,05:1 | 5,52:1 | 5,9:1 | 6,56:1 | 7,06:1 | 7,63:1 |
| Rate | 0,33 hp/rpm | 0,35 hp/rpm | 0,30 hp/rpm | 0,25 hp/rpm | 0,20 hp/rpm | 0,17 hp/rpm | ||
Main Data
| Input speed | 1000-2500r/min | ||
| Reduction ratio | 4.00 | Trans. capacity | 0.257kw/r/min |
| 4.48 | 0.243kw/r/min | ||
| 5.05 | 0.221kw/r/min | ||
| 5.52,5.90 | 0.184kw/r/min | ||
| 6.56,7.06 | 0.147kw/r/min | ||
| 7.63 | 0.125kw/r/min | ||
| Control way | Push-and-pull flexible shaft, electrically, pneumatically | ||
| Rated thrust | 60KN | ||
| Center distance | 355mm | ||
| L×W×H | 786×980×1041mm | ||
| Net weight | 940kg | ||
| Flywheel | 12V135,SAE18,16,14 | ||
| Bell housing | 12V135,SAE0,1 | ||
Our Service
Pre-Sales Service
* Inquiry and consulting support.
* Sample testing support.
* View our Factory.
After-Sales Service
* Training how to instal the machine, training how to use the machine.
* Engineers available to service machinery overseas.
| model | ratio | Rate (HP/rpm) |
Engine speed(rpm) |
overall dimension L*W*H(mm) |
Net Weight (kgs) |
| MARINE GEARBOX 6 | 2.52 3.05 3.5 | 0.0044 | 1000~2100 | 350× 316× 482 | 58 |
| MARINE GEARBOX 16A | 2.07 2.48 2.95 3.35 3.383 | 0.012 | 1000~2000 | 422× 325× 563 | 84 |
| MARINE GEARBOX MD571 | 1.56 1.88 2.63 | 0.009~0.012 | 4000 | 281× 230× 221 | 15 |
| MARINE GEARBOX MA100 | 1.6 2.0 2.55 3.11 3.59 3.88 | 0.006~0.009 | 1500~3000 | 236× 390× 420 | 75 |
| MARINE GEARBOX MA125 | 2.03 2.46 3.04 3.57 4.05 4.39 4.7 | 0.011~0.02 | 1500~3000 | 291× 454× 485 | 115 |
| MARINE GEARBOX MA142 | 1.97 2.52 3.03 3.54 3.95 4.5 5.06 5.47 | 0.013~0.03 | 1500~2500 | 308× 520× | 140 |
| MARINE GEARBOX 40A | 2.07 2.96 3.44 | 0.571~0.03 | 750~2000 | 414× 610× 620 | 225 |
| MARINE GEARBOX MB170 | 1.97 2.52 3.03 3.54 3.96 4.50 5.06 5.47 5.88 | 0.571~0.039 | 1000~2500 | 485× 610× 656 | 240 |
| MARINE GEARBOX HCU65 | 2.045 2.50 3.068 3.427 | 0.045 | 1000~2200 | 504× 600× 808 | 260 |
| MARINE GEARBOX HC65 | 1.53 2.03 2.50 2.96 | 0.044~0.048 | 1000~2500 | 311× 460× 544 | 130 |
| MARINE GEARBOX 120B | 2.03 2.81 3.73 | 0.044~0.088 | 750~1800 | 605× 744× 770 | 400 |
| MARINE GEARBOX 120C | 1.48 1.94 2.45 2.96 3.35 | 0.08~0.1 | 1000~2500 | 352× 694× 650 | 225 |
| MARINE GEARBOX MV100 | 1.23 1.62 2.07 2.52 2.87 | 0.08~0.1 | 1500~3000 | 390× 630× 580 | 220 |
| MARINE GEARBOX HCV120 | 1.509 2.016 2.524 | 0.076~0.01 | 1500~2500 | 502× 600× 847 | 300 |
| MARINE GEARBOX 135 | 2.03 2.59 3.04 3.62 4.11 4.65 5.06 5.47 5.81 | 0.070~0.10 | 1000~2000 | 578× 744× 830 | 470 |
| MARINE GEARBOX MB242 | 3.04 3.52 3.95 4.53 5.12 5.56 5.88 | 0.074~0.013 | 1000~2500 | 442× 744× 763 | 385 |
| MARINE GEARBOX HC138 | 2.52 3.0 3.57 4.05 4.45 | 0.11 | 1000~2500 | 520× 792× 760 | 360 |
| MARINE GEARBOX HC200 | 1.48 2.0 2.28 | 0.147 | 1000~2200 | 430× 744× 708 | 280 |
| MARINE GEARBOX MB270A | 4.05 4.53 5.12 5.50 5.95 6.39 6.82 | 0.088~0.147 | 1000~2500 | 594× 810× 868 | 675 |
| MARINE GEARBOX HCV230 | 1.485 1.956 2.483 | 0.146~0.184 | 1000~2200 | 568× 620× 1571 | 450 |
| MARINE GEARBOX HCQ300 | 1.06 1.46 2.05 2.38 | 0.235~0.250 | 1000~2300 | 533× 681× 676 | 360 |
| MARINE GEARBOX 300 | 2.04 2.54 3.0 3.53 4.1 4.61 4.94 5.44 | 0.125~0.257 | 1000~2300 | 638× 870× 864 | 740 |
| MARINE GEARBOX D300 | 4.0 4.48 5.05 5.52 5.90 6.56 7.06 7.63 | 0.125~0.257 | 1000~2300 | 638× 920× 1040 | 880 |
| MARINE GEARBOX T300 | 6.03 6.65 7.04 7.54 8.02 | 0.221~0.243 | 1000~2300 | 640× 920× 1110 | 1120 |
| MARINE GEARBOX HCV400 | 1.388 2.0 | 0.274~0.30 | 1000~1800 | 780× 740× 1192 | 650 |
| MARINE GEARBOX HC400 | 2.04 2.50 3.0 3.42 4.06 | 0.279~0.331 | 1000~1800 | 641× 890× 890 | 820 |
| MARINE GEARBOX HCD400A | 3.96 4.33 4.43 4.70 5.0 5.53 5.89 | 0.272~0.331 | 1000~1800 | 641× 950× 988 | 1100 |
| MARINE GEARBOX HCT400A | 6.096 6.49 6.93 7.42 7.95 8.40 9.0 9.47 | 0.243~0.331 | 1000~2100 | 784× 992× 1130 | 1450 |
| MARINE GEARBOX HCT400A~1 | 8.15 8.69 9.27 9.94 10.60 11.46 12 | 0.262~0.331 | 1000~2100 | 869× 1100× 1275 | 1500 |
| MARINE GEARBOX HC600A | 2.0 2.48 3.0 3.58 3.89 | 0.40~0.48 | 1000~2100 | 745× 1094× 1126 | 1300 |
| MARINE GEARBOX HCD600A | 4.18 4.43 4.70 5.0 5.44 5.71 | 0.40~0.48 | 1000~2100 | 745× 1094× 1271 | 1550 |
| MARINE GEARBOX HCT600A | 6.06 6.49 6.97 7.51 8.04 8.66 9.35 | 0.28~0.44 | 1000~2100 | 805× 1094× 1271 | 1600 |
| MARINE GEARBOX HCT600A~1 | 8.23 8.82 9.47 10.8 11.65 12.57 | 0.331~0.441 | 1000~2100 | 878× 1224× 1346 | 1700 |
| MARINE GEARBOX 750B | 1.49 1.97 2.48 2.92 | 0.55 | 600~1200 | 1117× 850× 1170 | 1600 |
| MARINE GEARBOX CHT800 | 5.57 5.68 5.93 6.43 6.86 7.33 7.84 | 0.515~0.625 | 800~1800 | 1056× 1280× 1425 | 2000 |
| MARINE GEARBOX 900 | 1.46 2.04 2.47 3.0 3.60 4.08 4.63 4.95 | 0.40~0.66 | 600~1600 | 1115× 850× 1310 | 1600 |
The delivery moment
We have closely related transportation companies, engineering logistics, containers, air freight, international railways. International ground transportation.
There are many ways to choose, and the shipping cost is even lower. Timeliness is higher.
Our Company
ZheJiang CZPT Power Technology Co., Ltd. is located in HangZhou City, ZheJiang Province. The KangMS POWER brand of the company has become a CZPT brand that has successfully operated in the field of power generation equipment.
Unified R & D and dedicated production
The R & D team at the ZheJiang headquarters formulates unified technical specifications and production processes based on advanced technology and innovative concepts. The production plant in HangZhou, China, through strict international management systems and standard production processes, manufactures high-quality KangMS POWER power generation equipment .
Unified research and development of high-quality production
The R & D and production team at ZheJiang headquarters, power generation equipment and related ancillary products are tailored to the needs of our customers with the purpose of durability and high reliability. Related products have been well received by customers at home and abroad.
Global sales and service network
ZheJiang CZPT Power Technology Co., Ltd. has always focused on providing Kans Ms POWER power system quality products and services to customers at home and abroad. The excellent performance of ZheJiang CZPT Power Technology Co., Ltd. can be seen in industries and projects such as highways, railways, post and telecommunications, water conservancy, airports, factories and mines, and high-rise buildings.
The company has increased its efforts to extend the industry horizontally and vertically. Not only has it vigorously developed “gas generator sets and system engineering, heavy oil power station construction, marine diesel generator sets, ship mainframes and oil supply systems”, and has provided fuel and gas power generation system technology and The full-service of the equipment also focuses on the field of new energy. In the research, development and application of new energy and high-efficiency energy-saving technologies and products, it has created new and characteristic industries, covering the efficient use of solar energy and the integration of biomass energy. Utilization and biogas projects, industrial waste gas, waste heat recovery and utilization, biogas, natural gas, coal bed gas, oilfield associated gas generation and other industrial development of power generation and engineering applications.
The company adapts to the new situation, comprehensively enhances the comprehensive competitiveness of the enterprise, and consistently implements and implements the whole process and all-round of enterprise management, and puts people-oriented, harmonious concepts and modern enterprise management systems in order to standardize and improve the internal management of enterprises. With the development needs of the enterprise, a high-tech, large-scale and strong group company has continuously demonstrated its unique charm and style, and continues to win customers by quality, base itself on the market with credibility, reward society with value, and CZPT the future with strength. Go hand in hand with all sectors of society to create brilliant!
| Application: | Marine |
|---|---|
| Function: | Change Drive Direction, Speed Changing, Speed Reduction |
| Layout: | Cycloidal |
| Hardness: | Hardened Tooth Surface |
| Installation: | Horizontal Type |
| Step: | Three-Step |
| Customization: |
Available
| Customized Request |
|---|
Cyclone Gearbox Vs Involute Gearbox
Whether you’re using a cycloidal gearbox or an involute gearbox for your application, there are a few things you should know. This article will highlight some of those things, including: cycloidal gearbox vs involute gearbox, weight, compressive force, precision, and torque density.
Compressive force
Several studies have been carried out to analyze the static characteristics of gears. In this article, the authors investigate the structural and kinematic principles of a cycloidal gearbox. The cycloidal gearbox is a gearbox that uses an eccentric bearing inside a rotating frame. It has no common pinion-gear pair, and is therefore ideal for a high reduction ratio.
The purpose of this paper is to investigate the stress distribution on a cycloidal disc. Various gear profiles are investigated in order to study the load distribution and dynamic effects.
Cycloidal gearboxes are subject to compression and backlash, which require the use of proper ratios for the bearing rate and the TSA. The paper also focuses on the kinematic principles of the reducer. In addition, the authors use standard analysis techniques for the shaft/gear and the cycloidal disc.
The authors previously worked on a rigid body dynamic simulation of a cycloidal reducer. The analysis used a trochoidal profile on the cycloidal disc periphery. The trochoidal profile is obtained from a manufacturing drawing and takes into account the tolerances.
The mesh density in the cycloidal disc captures the exact geometry of the parts. It provides accurate contact stresses.
The cycloidal disc consists of nine lobes, which move by one lobe per rotation of the drive shaft. However, when the disc is rotated around the pins, the cycloidal disc does not move around the center of gravity. Therefore, the cycloidal disc shares torque load with five outer rollers.
A low reduction ratio in a cycloidal gearbox results in a higher induced stress in the cycloidal disc. This is due to the bigger hole designed to reduce the material inside the disc.
Torque density
Several types of magnetic gearboxes have been studied. Some magnetic gearboxes have a higher torque density than others, but they are still not able to compete with the mechanical gearboxes.
A new high torque density cycloidal magnetic gearbox using Halbach rotors has been developed and is being tested. The design was validated by building a CPCyMG prototype. The results showed that the simulated slip torque was comparable to the experimental slip torque. The peak torque measured was a p3 = 14 spatial harmonic, and it corresponds to the active region torque density of 261.4 N*m/L.
This cycloidal gearbox also has a high gear ratio. It has been tested to achieve a peak torque of 147.8 Nm, which is more than double the torque density of the traditional cycloidal gearbox. The design incorporates a ferromagnetic back-support that provides mechanical fabrication support.
This cycloidal gearbox also shows how a small diameter can achieve a high torque density. It is designed with an axial length of 50mm. The radial deflection forces are not serious at this length. The design uses a small air gap to reduce the radial deflection forces, but it is not the only design option.
The trade-off design also has a high volumetric torque density. It has a smaller air gap and a higher mass torque density. It is feasible to make and mechanically strong. The design is also one of the most efficient in its class.
The helical gearing design is a newer technology that brings a higher level of precision to a cycloidal gearbox. It allows a servomotor to handle a heavy load at high cycle rates. It is also useful in applications that require smaller design envelopes.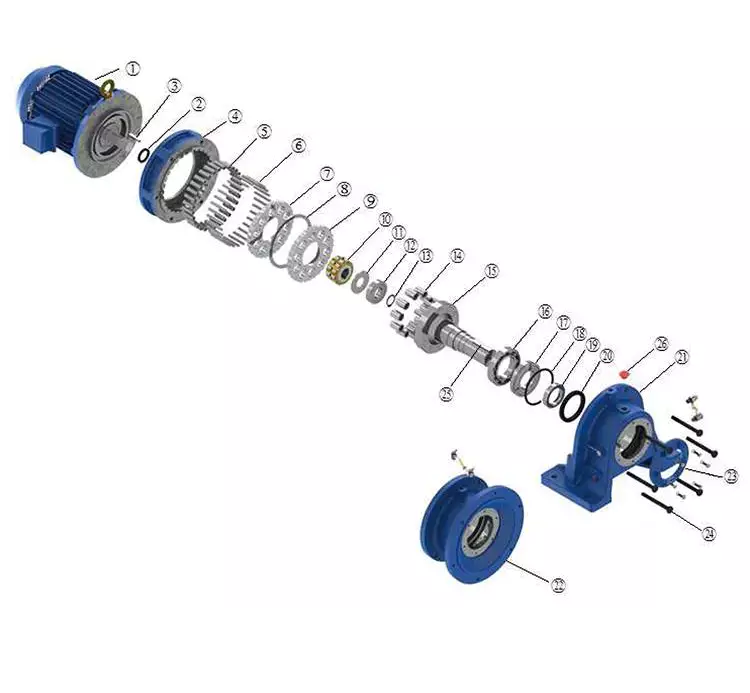
Weight
Compared to planetary gearboxes, the weight of cycloidal gearboxes is not as significant. However, they do provide some advantages. One of the most significant features is their backlash-free operation, which helps them deliver smooth and precise movement.
In addition, they provide high efficiency, which means that servo motors can run at higher speeds. The best part is that they do not need to be stacked up in order to achieve a high ratio.
Another advantage of cycloidal gearboxes is that they are usually less expensive than planetary gearboxes. This means that they are suitable for the manufacturing industry and robotics. They are also suited for heavy-duty robots that require a robust gearbox.
They also provide a better reduction ratio. Cycloidal gears can achieve reduction ratios from 30:1 to 300:1, which is a huge improvement over planetary gears. However, there are few models available that provide a ratio below 30:1.
Cycloidal gears also offer more resistance to wear, which means that they can last longer than planetary gears. They are also more compact, which helps them achieve high ratios in a smaller space. The design of cycloidal gears also makes them less prone to backlash, which is one of the major shortcomings of planetary gearboxes.
In addition, cycloidal gears can also provide better positioning accuracy. In fact, this is one of the primary reasons for choosing cycloidal gears over planetary gears. This is because the cycloid disc rotates around a bearing independently of the input shaft.
Compared to planetary gearboxes, cycloidal gears are also much shorter. This means that they provide the best positioning accuracy. They are also 50% lighter, meaning that they have a smaller diameter.
Precision
Several experts have studied the cycloidal gearbox in precision reducers. Their research mainly focuses on the mathematical model and the method for precision evaluation of cycloidal gears.
The traditional modification design of cycloidal gears is mainly realized by setting various machining parameters and center position of the grinding wheel. But it has some disadvantages because of unstable meshing accuracy and uncontrollable tooth profile curve shape.
In this study, a new method of modification design of cycloidal gears is proposed. This method is based on the calculation of meshing backlash and pressure angle distribution. It can effectively pre-control the transmission accuracy of cycloid-pin gear. It can also ensure good meshing characteristics.
The proposed method can be applied in the manufacture of rotary vector reducers. It is also applicable in the precision reducer for robots.
The mathematical model for cycloidal gears can be established with the pressure angle a as a dependent variable. It is possible to calculate the pressure angle distribution and the profile pressure angle. It can also be expressed as DL=f(a). It can be applied in the design of precision reducers.
The study also considers the root clearance, the backlash of gear teeth and the profile angle. These factors have a direct effect on the transmission performance of cycloidal gear. It also indicates the higher motion accuracy and the smaller backlash. The modified profile can also reflect the smaller transmission error.
In addition, the proposed method is also based on the calculation of lost motion. It determines the angle of first tooth contacts. This angle is an important factor affecting the modification quality. The transmission error after the second cycloid method is the least.
Finally, a case study on the CZPT RV-35N gear pair is shown to prove the proposed method.
Involute gears vs cycloidal gears
Compared to involute gears, cycloidal gears have a lower noise, less friction, and last longer. However, they are more expensive. Cycloidal gears can be more difficult to manufacture. They may be less suitable for certain applications, including space manipulators and robotic joints.
The most common gear profile is the involute curve of a circle. This curve is formed by the endpoint of an imaginary taut string unwinding from the circle.
Another curve is the epicycloid curve. This curve is formed by the point rigidly attached to the circle rolling over another circle. This curve is difficult to produce and is much more expensive to produce than the involute curve.
The cycloid curve of a circle is also an example of the multi-cursor. This curve is generated by the locus of the point on the circle’s circumference.
The cycloid curve has the same diameter as the involute curve, but is tangentially curving along the circle’s diameter. This curve is also classified as ordinary. It has several other functions. The FE method was used to analyze the strain state of cycloidal speed reducers.
There are many other curves, but the involute curve is the most widely used gear profile. The involute curve of a circle is a spiraling curve traced by the endpoint of an imaginary tautstring.
Involute gears are a lot like a set of Lego blocks. They are a lot of fun to play with. They also have a lot of advantages. For example, they can handle center sifts better than cycloidal gears. They are also much easier to manufacture, so the cost of involute teeth is lower. However, they are obsolete.
Cycloidal gears are also more difficult to manufacture than involute gears. They have a convex surface, which leads to more wear. They also have a simpler shape than involute gears. They also have less teeth. They are used in rotary motions, such as in the rotors of screw compressors.

editor by CX 2023-04-21
China Machinery Cycloidal Gpg Carton Gpb090 Wenzhou Marine Gearbox Robotic Arm cycloidal gearbox reducer
Merchandise Description
TaiBang Motor Market Team Co., Ltd.
The main items is induction motor, reversible motor, DC brush gear motor, DC brushless equipment motor, CH/CV large equipment motors, Planetary gear motor ,Worm gear motor etc, which utilised widely in different fields of production pipelining, transportation, foods, medicine, printing, cloth, packing, business office, equipment, enjoyment and many others, and is the preferred and matched solution for automated device.
Taibang planetary gear motor is substantial energy performance,reduced sound,prolonged service life,which is extensively utilised in different market.
Product Instruction
| GE | 090 | 571 | P2 |
| Reducer Series Code | External Diameter | Reduction Ratio | Reducer Backlash |
| GB:High Precision Sq. Flange Output
GBR:High Precision Proper Angle Sq. Flange Output GE:Higher Precision Round Flange Output GER:Large Precision Right Round Flange Output |
050:ø50mm 070:ø70mm 090:ø90mm a hundred and twenty:ø120mm a hundred and fifty five:ø155mm 205:ø205mm 235:ø235mm 042:42x42mm 060:60x60mm 090:90x90mm a hundred and fifteen:115x115mm 142:142x142mm 180:180x180mm 220:220x220mm |
571 implies 1:ten | P0:High Precision Backlash
P1:Precison Backlash P2:Standard Backlash |
Main Technological Functionality
| Item | Amount of phase | Reduction Ratio | GB042 | GB060 | GB060A | GB090 | GB090A | GB115 | GB142 | GB180 | GB220 |
| Rotary Inertia | 1 | three | .03 | .sixteen | .sixty one | 3.twenty five | 9.21 | 28.98 | 69.61 | ||
| 4 | .03 | .fourteen | .48 | 2.seventy four | 7.fifty four | 23.sixty seven | 54.37 | ||||
| 5 | .03 | .13 | .forty seven | 2.seventy one | seven.42 | 23.29 | fifty three.27 | ||||
| 6 | .03 | .13 | .forty five | 2.sixty five | seven.twenty five | 22.75 | 51.seventy two | ||||
| 7 | .03 | .thirteen | .45 | 2.62 | 7.fourteen | 22.forty eight | fifty.97 | ||||
| eight | .03 | .13 | .44 | 2.fifty eight | seven.07 | 22.fifty nine | fifty.eighty four | ||||
| 9 | .03 | .13 | .forty four | two.fifty seven | seven.04 | 22.53 | fifty.63 | ||||
| 10 | .03 | .thirteen | .forty four | two.57 | seven.03 | 22.fifty one | fifty.fifty six | ||||
| 2 | 15 | .03 | .03 | .13 | .13 | .forty seven | .forty seven | two.seventy one | 7.42 | 23.29 | |
| 20 | .03 | .03 | .13 | .thirteen | .47 | .forty seven | two.seventy one | 7.42 | 23.29 | ||
| twenty five | .03 | .03 | .13 | .thirteen | .47 | .47 | two.seventy one | 7.42 | 23.29 | ||
| thirty | .03 | .03 | .thirteen | .13 | .47 | .47 | 2.seventy one | seven.42 | 23.29 | ||
| 35 | .03 | .03 | .thirteen | .13 | .forty seven | .forty seven | two.71 | seven.42 | 23.29 | ||
| forty | .03 | .03 | .thirteen | .13 | .47 | .forty seven | two.seventy one | seven.forty two | 23.29 | ||
| forty five | .03 | .03 | .13 | .thirteen | .47 | .47 | two.71 | seven.forty two | 23.29 | ||
| fifty | .03 | .03 | .13 | .thirteen | .44 | .forty four | 2.57 | 7.03 | 22.51 | ||
| 60 | .03 | .03 | .13 | .thirteen | .44 | .44 | two.57 | 7.03 | 22.51 | ||
| 70 | .03 | .03 | .thirteen | .13 | .44 | .forty four | two.57 | seven.03 | 22.fifty one | ||
| eighty | .03 | .03 | .thirteen | .thirteen | .forty four | .44 | two.fifty seven | seven.03 | 22.fifty one | ||
| ninety | .03 | .03 | .13 | .13 | .forty four | .44 | 2.fifty seven | seven.03 | 22.fifty one | ||
| one hundred | .03 | .03 | .13 | .13 | .44 | .forty four | two.fifty seven | 7.03 | 22.51 |
| Item | Variety of stage | GB042 | GB060 | GB060A | GB90 | GB090A | GB115 | GB142 | GB180 | GB220 | |
| Backlash(arcmin) | High Precision P0 | 1 | ≤1 | ≤1 | ≤1 | ≤1 | ≤1 | ≤1 | |||
| 2 | ≤3 | ≤3 | ≤3 | ≤3 | |||||||
| Precision P1 | 1 | ≤3 | ≤3 | ≤3 | ≤3 | ≤3 | ≤3 | ≤3 | ≤3 | ≤3 | |
| 2 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ||
| Standard P2 | 1 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | |
| 2 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ||
| Torsional Rigidity(N.M/arcmin) | 1 | 3 | seven | 7 | fourteen | 14 | twenty five | fifty | 145 | 225 | |
| two | three | seven | seven | 14 | fourteen | twenty five | 50 | 145 | 225 | ||
| Noise(dB) | one,two | ≤56 | ≤58 | ≤58 | ≤60 | ≤60 | ≤63 | ≤65 | ≤67 | ≤70 | |
| Rated input velocity(rpm) | one,two | 5000 | 5000 | 5000 | 4000 | 4000 | 4000 | 3000 | 3000 | 2000 | |
| Max enter pace(rpm) | one,two | ten thousand | ten thousand | 10000 | 8000 | 8000 | 8000 | 6000 | 6000 | 4000 | |
Noise take a look at common:Distance 1m,no load.Calculated with an input pace 3000rpm
|
US $50 / Piece | |
1 Piece (Min. Order) |
###
| Application: | Machinery, Agricultural Machinery, Automatic Machinery |
|---|---|
| Function: | Distribution Power, Change Drive Torque, Change Drive Direction, Speed Reduction |
| Layout: | Cycloidal |
| Hardness: | Hardened Tooth Surface |
| Installation: | Vertical Type |
| Step: | Double-Step |
###
| Samples: |
US$ 50/Piece
1 Piece(Min.Order) |
|---|
###
| Customization: |
Available
|
|---|
###
| GE | 090 | 010 | P2 |
| Reducer Series Code | External Diameter | Reduction Ratio | Reducer Backlash |
| GB:High Precision Square Flange Output
GBR:High Precision Right Angle Square Flange Output GE:High Precision Round Flange Output GER:High Precision Right Round Flange Output |
050:ø50mm 070:ø70mm 090:ø90mm 120:ø120mm 155:ø155mm 205:ø205mm 235:ø235mm 042:42x42mm 060:60x60mm 090:90x90mm 115:115x115mm 142:142x142mm 180:180x180mm 220:220x220mm |
010 means 1:10 | P0:High Precision Backlash
P1:Precison Backlash P2:Standard Backlash |
###
| Item | Number of stage | Reduction Ratio | GB042 | GB060 | GB060A | GB090 | GB090A | GB115 | GB142 | GB180 | GB220 |
| Rotary Inertia | 1 | 3 | 0.03 | 0.16 | 0.61 | 3.25 | 9.21 | 28.98 | 69.61 | ||
| 4 | 0.03 | 0.14 | 0.48 | 2.74 | 7.54 | 23.67 | 54.37 | ||||
| 5 | 0.03 | 0.13 | 0.47 | 2.71 | 7.42 | 23.29 | 53.27 | ||||
| 6 | 0.03 | 0.13 | 0.45 | 2.65 | 7.25 | 22.75 | 51.72 | ||||
| 7 | 0.03 | 0.13 | 0.45 | 2.62 | 7.14 | 22.48 | 50.97 | ||||
| 8 | 0.03 | 0.13 | 0.44 | 2.58 | 7.07 | 22.59 | 50.84 | ||||
| 9 | 0.03 | 0.13 | 0.44 | 2.57 | 7.04 | 22.53 | 50.63 | ||||
| 10 | 0.03 | 0.13 | 0.44 | 2.57 | 7.03 | 22.51 | 50.56 | ||||
| 2 | 15 | 0.03 | 0.03 | 0.13 | 0.13 | 0.47 | 0.47 | 2.71 | 7.42 | 23.29 | |
| 20 | 0.03 | 0.03 | 0.13 | 0.13 | 0.47 | 0.47 | 2.71 | 7.42 | 23.29 | ||
| 25 | 0.03 | 0.03 | 0.13 | 0.13 | 0.47 | 0.47 | 2.71 | 7.42 | 23.29 | ||
| 30 | 0.03 | 0.03 | 0.13 | 0.13 | 0.47 | 0.47 | 2.71 | 7.42 | 23.29 | ||
| 35 | 0.03 | 0.03 | 0.13 | 0.13 | 0.47 | 0.47 | 2.71 | 7.42 | 23.29 | ||
| 40 | 0.03 | 0.03 | 0.13 | 0.13 | 0.47 | 0.47 | 2.71 | 7.42 | 23.29 | ||
| 45 | 0.03 | 0.03 | 0.13 | 0.13 | 0.47 | 0.47 | 2.71 | 7.42 | 23.29 | ||
| 50 | 0.03 | 0.03 | 0.13 | 0.13 | 0.44 | 0.44 | 2.57 | 7.03 | 22.51 | ||
| 60 | 0.03 | 0.03 | 0.13 | 0.13 | 0.44 | 0.44 | 2.57 | 7.03 | 22.51 | ||
| 70 | 0.03 | 0.03 | 0.13 | 0.13 | 0.44 | 0.44 | 2.57 | 7.03 | 22.51 | ||
| 80 | 0.03 | 0.03 | 0.13 | 0.13 | 0.44 | 0.44 | 2.57 | 7.03 | 22.51 | ||
| 90 | 0.03 | 0.03 | 0.13 | 0.13 | 0.44 | 0.44 | 2.57 | 7.03 | 22.51 | ||
| 100 | 0.03 | 0.03 | 0.13 | 0.13 | 0.44 | 0.44 | 2.57 | 7.03 | 22.51 |
###
| Item | Number of stage | GB042 | GB060 | GB060A | GB90 | GB090A | GB115 | GB142 | GB180 | GB220 | |
| Backlash(arcmin) | High Precision P0 | 1 | ≤1 | ≤1 | ≤1 | ≤1 | ≤1 | ≤1 | |||
| 2 | ≤3 | ≤3 | ≤3 | ≤3 | |||||||
| Precision P1 | 1 | ≤3 | ≤3 | ≤3 | ≤3 | ≤3 | ≤3 | ≤3 | ≤3 | ≤3 | |
| 2 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ||
| Standard P2 | 1 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | |
| 2 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ||
| Torsional Rigidity(N.M/arcmin) | 1 | 3 | 7 | 7 | 14 | 14 | 25 | 50 | 145 | 225 | |
| 2 | 3 | 7 | 7 | 14 | 14 | 25 | 50 | 145 | 225 | ||
| Noise(dB) | 1,2 | ≤56 | ≤58 | ≤58 | ≤60 | ≤60 | ≤63 | ≤65 | ≤67 | ≤70 | |
| Rated input speed(rpm) | 1,2 | 5000 | 5000 | 5000 | 4000 | 4000 | 4000 | 3000 | 3000 | 2000 | |
| Max input speed(rpm) | 1,2 | 10000 | 10000 | 10000 | 8000 | 8000 | 8000 | 6000 | 6000 | 4000 | |
|
US $50 / Piece | |
1 Piece (Min. Order) |
###
| Application: | Machinery, Agricultural Machinery, Automatic Machinery |
|---|---|
| Function: | Distribution Power, Change Drive Torque, Change Drive Direction, Speed Reduction |
| Layout: | Cycloidal |
| Hardness: | Hardened Tooth Surface |
| Installation: | Vertical Type |
| Step: | Double-Step |
###
| Samples: |
US$ 50/Piece
1 Piece(Min.Order) |
|---|
###
| Customization: |
Available
|
|---|
###
| GE | 090 | 010 | P2 |
| Reducer Series Code | External Diameter | Reduction Ratio | Reducer Backlash |
| GB:High Precision Square Flange Output
GBR:High Precision Right Angle Square Flange Output GE:High Precision Round Flange Output GER:High Precision Right Round Flange Output |
050:ø50mm 070:ø70mm 090:ø90mm 120:ø120mm 155:ø155mm 205:ø205mm 235:ø235mm 042:42x42mm 060:60x60mm 090:90x90mm 115:115x115mm 142:142x142mm 180:180x180mm 220:220x220mm |
010 means 1:10 | P0:High Precision Backlash
P1:Precison Backlash P2:Standard Backlash |
###
| Item | Number of stage | Reduction Ratio | GB042 | GB060 | GB060A | GB090 | GB090A | GB115 | GB142 | GB180 | GB220 |
| Rotary Inertia | 1 | 3 | 0.03 | 0.16 | 0.61 | 3.25 | 9.21 | 28.98 | 69.61 | ||
| 4 | 0.03 | 0.14 | 0.48 | 2.74 | 7.54 | 23.67 | 54.37 | ||||
| 5 | 0.03 | 0.13 | 0.47 | 2.71 | 7.42 | 23.29 | 53.27 | ||||
| 6 | 0.03 | 0.13 | 0.45 | 2.65 | 7.25 | 22.75 | 51.72 | ||||
| 7 | 0.03 | 0.13 | 0.45 | 2.62 | 7.14 | 22.48 | 50.97 | ||||
| 8 | 0.03 | 0.13 | 0.44 | 2.58 | 7.07 | 22.59 | 50.84 | ||||
| 9 | 0.03 | 0.13 | 0.44 | 2.57 | 7.04 | 22.53 | 50.63 | ||||
| 10 | 0.03 | 0.13 | 0.44 | 2.57 | 7.03 | 22.51 | 50.56 | ||||
| 2 | 15 | 0.03 | 0.03 | 0.13 | 0.13 | 0.47 | 0.47 | 2.71 | 7.42 | 23.29 | |
| 20 | 0.03 | 0.03 | 0.13 | 0.13 | 0.47 | 0.47 | 2.71 | 7.42 | 23.29 | ||
| 25 | 0.03 | 0.03 | 0.13 | 0.13 | 0.47 | 0.47 | 2.71 | 7.42 | 23.29 | ||
| 30 | 0.03 | 0.03 | 0.13 | 0.13 | 0.47 | 0.47 | 2.71 | 7.42 | 23.29 | ||
| 35 | 0.03 | 0.03 | 0.13 | 0.13 | 0.47 | 0.47 | 2.71 | 7.42 | 23.29 | ||
| 40 | 0.03 | 0.03 | 0.13 | 0.13 | 0.47 | 0.47 | 2.71 | 7.42 | 23.29 | ||
| 45 | 0.03 | 0.03 | 0.13 | 0.13 | 0.47 | 0.47 | 2.71 | 7.42 | 23.29 | ||
| 50 | 0.03 | 0.03 | 0.13 | 0.13 | 0.44 | 0.44 | 2.57 | 7.03 | 22.51 | ||
| 60 | 0.03 | 0.03 | 0.13 | 0.13 | 0.44 | 0.44 | 2.57 | 7.03 | 22.51 | ||
| 70 | 0.03 | 0.03 | 0.13 | 0.13 | 0.44 | 0.44 | 2.57 | 7.03 | 22.51 | ||
| 80 | 0.03 | 0.03 | 0.13 | 0.13 | 0.44 | 0.44 | 2.57 | 7.03 | 22.51 | ||
| 90 | 0.03 | 0.03 | 0.13 | 0.13 | 0.44 | 0.44 | 2.57 | 7.03 | 22.51 | ||
| 100 | 0.03 | 0.03 | 0.13 | 0.13 | 0.44 | 0.44 | 2.57 | 7.03 | 22.51 |
###
| Item | Number of stage | GB042 | GB060 | GB060A | GB90 | GB090A | GB115 | GB142 | GB180 | GB220 | |
| Backlash(arcmin) | High Precision P0 | 1 | ≤1 | ≤1 | ≤1 | ≤1 | ≤1 | ≤1 | |||
| 2 | ≤3 | ≤3 | ≤3 | ≤3 | |||||||
| Precision P1 | 1 | ≤3 | ≤3 | ≤3 | ≤3 | ≤3 | ≤3 | ≤3 | ≤3 | ≤3 | |
| 2 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ||
| Standard P2 | 1 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | |
| 2 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ||
| Torsional Rigidity(N.M/arcmin) | 1 | 3 | 7 | 7 | 14 | 14 | 25 | 50 | 145 | 225 | |
| 2 | 3 | 7 | 7 | 14 | 14 | 25 | 50 | 145 | 225 | ||
| Noise(dB) | 1,2 | ≤56 | ≤58 | ≤58 | ≤60 | ≤60 | ≤63 | ≤65 | ≤67 | ≤70 | |
| Rated input speed(rpm) | 1,2 | 5000 | 5000 | 5000 | 4000 | 4000 | 4000 | 3000 | 3000 | 2000 | |
| Max input speed(rpm) | 1,2 | 10000 | 10000 | 10000 | 8000 | 8000 | 8000 | 6000 | 6000 | 4000 | |
Developing a Mathematical Model of a Cyclone Gearbox
Compared to planetary gearboxes, cycloidal gearboxes are often seen as the ideal choice for a wide range of applications. They feature compact designs that are often low friction and high reduction ratios.
Low friction
Developing a mathematical model of a cycloidal gearbox was a challenge. The model was able to show the effects of a variety of geometric parameters on contact stresses. It was able to model stiction in all quadrants. It was able to show a clear correlation between the results from simulation and real-world measurements.
The model is based on a new approach that enables modeling stiction in all quadrants of a gearbox. It is also able to display non-zero current at standstill. Combined with a good simulation algorithm, the model can be used to improve the dynamic behaviour of a controlled system.
A cycloidal gearbox is a compact actuator used for industrial automation. This type of gearbox provides high gear ratios, low wear, and good torsional stiffness. In addition, it has good shock load capacity.
The model is based on cycloidal discs that engage with pins on a stationary ring gear. The resulting friction function occurs when the rotor begins to rotate. It also occurs when the rotor reverses its rotation. The model has two curves, one for motor and one for generator mode.
The trochoidal profile on the cycloidal disc’s periphery is required for proper mating of the rotating parts. In addition, the profile should be defined accurately. This will allow an even distribution of contact forces.
The model was used to compare the relative performance of a cycloidal gearbox with that of an involute gearbox. This comparison indicates that the cycloidal gearbox can withstand more load than an involute gearbox. It is also able to last longer. It is also able to produce high gear ratios in a small space.
The model used is able to capture the exact geometry of the parts. It can also allow a better analysis of stresses.
Compact
Unlike helical gearing, compact cycloidal gearboxes can provide higher reduction ratios. They are more compact and less weighty. In addition, they provide better positioning accuracy.
Cycloid drives provide high torque and load capacity. They are also very efficient and robust. They are ideal for applications with heavy loads or shock loads. They also feature low backlash and high torsional stiffness. Cycloid gearboxes are available in a variety of designs.
Cycloid discs are mounted on an eccentric input shaft, which drives them around a stationary ring gear. The ring gear consists of many pins, and the cycloidal disc moves one lobe for every rotation of the input shaft. The output shaft contains roller pins, which rotate around holes in the cycloidal disc.
Cycloid drives are ideally suited to heavy loads and shock loads. They have high torsional stiffness and high reduction ratios, making them very efficient. Cycloid gearboxes have low backlash and high torque and are very compact.
Cycloid gearboxes are used for a wide variety of applications, including marine propulsion systems, CNC machining centers, medical technology, and manipulation robots. They are especially useful in applications with critical positioning accuracy, such as surgical positioning systems. Cycloid gearboxes feature extremely low hysteresis loss and low backlash over extended periods of use.
Cycloid discs are usually designed with a reduced cycloid diameter to minimize unbalance forces at high speeds. Cycloid drives also feature minimal backlash, a high reduction ratio, and excellent positioning accuracy. Cycloid gearboxes also have a long service life, compared to other gear drives. Cycloid drives are highly robust, and offer higher reduction ratios than helical gear drives.
Cycloid gearboxes have a low cost and are easy to print. CZPT gearboxes are available in a wide range of sizes and can produce high torque on the output axis.
High reduction ratio
Among the types of gearboxes available, a high reduction ratio cycloidal gearbox is a popular choice in the automation field. This gearbox is used in applications requiring precise output and high efficiency.
Cycloid gears can provide high torque and transmit it well. They have low friction and a small backlash. They are widely used in robotic joints. However, they require special tools to manufacture. Some have even been 3D printed.
A cycloidal gearbox is typically a three-stage structure that includes an input hub, an output hub, and two cycloidal gears that rotate around each other. The input hub mounts movable pins and rollers, while the output hub mounts a stationary ring gear.
The input shaft is driven by an eccentric bearing. The disc is then pushed against the ring gear, which causes it to rotate around the bearing. As the disc rotates, the pins on the ring gear drive the pins on the output shaft.
The input shaft rotates a maximum of nine revolutions, while the output shaft rotates three revolutions. This means that the input shaft has to rotate over eleven million times before the output shaft is able to rotate. The output shaft also rotates in the opposite direction of the input shaft.
In a two-stage differential cycloidal speed reducer, the input shaft uses a crank shaft design. The crank shaft connects the first and second cycloidal gears and actuates them simultaneously.
The first stage is a cycloidal disc, which is a gear tooth profile. It has n=7 lobes on its circumference. Each lobe moves around a reference pitch circle of pins. The disc then advances in 360deg steps.
The second stage is a cycloidal disc, also known as a “grinder gear”. The teeth on the outer gear are fewer than the teeth on the inner gear. This allows the gear to be geardown based on the number of teeth.
Kinematics
Various scholars have studied the kinematics of cycloidal gearbox. They have developed various approaches to modify the tooth profile of cycloidal gears. Some of these approaches involve changing the shape of the cycloidal disc, and changing the grinding wheel center position.
This paper describes a new approach to cycloid gear profile modification. It is based on a mathematical model and incorporates several important parameters such as pressure angle, backlash, and root clearance. The study offers a new way for modification design of cycloid gears in precision reducers for robots.
The pressure angle of a tooth profile is an intersegment angle between the normal direction and the velocity direction at a meshing point. The pressure angle distribution is important for determining force transmission performance of gear teeth in meshing. The distribution trend can be obtained by calculating the equation (5).
The mathematical model for modification of the tooth profile can be obtained by establishing the relationship between the pressure angle distribution and the modification function. The dependent variable is the modification DL and the independent variable is the pressure angle a.
The position of the reference point A is a major consideration in the modification design. It ensures the force transmission performance of the meshing segment is optimal. It is determined by the smallest profile pressure angle. The position is also dependent on the type of gear that is being modified. It is also influenced by the tooth backlash.
The mathematical model governing the pressure angle distribution is developed with DL=f(a). It is a piecewise function that determines the pressure angle distribution of a tooth profile. It can also be expressed as DL=ph.
The pressure angle of a tooth is also an angle between the common normal direction at the meshing point and the rotation velocity direction of the cycloid gear.
Planetary gearboxes vs cycloidal gearboxes
Generally, there are two types of gearboxes that are used for motion control applications: cycloidal gearbox and planetary gearbox. Cycloid gearboxes are used for high-frequency motions, while planetary gearboxes are suitable for low-speed applications. Both are highly accurate and precise gearboxes that are capable of handling heavy loads at high cycle rates. But they have different advantages and disadvantages. So, engineers need to determine which type of gearbox is best suited for their application.
Cycloid gearboxes are commonly used in industrial automation. They provide excellent performance with ratios as low as 10:1. They offer a more compact design, higher torque density and greater overload protection. They also require less space and are less expensive than planetary gearboxes.
On the other hand, planetary gearboxes are lightweight and offer a higher torque density. They are also capable of handling higher ratios. They have a longer life span and are more precise and durable. They can be found in a variety of styles, including square-framed, round-framed and double-frame designs. They offer a wide range of torque and speed capabilities and are used for numerous applications.
Cycloid gearboxes can be manufactured with different types of cycloidal cams, including single or compound cycloidal cams. Cycloid cams are cylindrical elements that have cam followers that rotate in an eccentric fashion. The cam followers act like teeth on the internal gear. Cycloid cams are a simple concept, but they have numerous advantages. They have a low backlash over extended periods of time, allowing for more accurate positioning. They also have internal compressive stresses and an overlap factor between the rolling elements.
Planetary gearboxes are characterized by three basic force-transmitting elements: ring gear, sun gear, and planet gear. They are generally two-stage gearboxes. The sun gear is attached to the input shaft, which in turn is attached to the servomotor. The ring gear turns the sun gear and the planet gear turns the output shaft.
editor by czh 2023-01-14