Product Description
Model Selection
ZD Leader has a wide range of micro motor production lines in the industry, including DC Motor, AC Motor, Brushless Motor, Planetary Gear Motor, Drum Motor, Planetary Gearbox, RV Reducer and Harmonic Gearbox etc. Through technical innovation and customization, we help you create outstanding application systems and provide flexible solutions for various industrial automation situations.
• Model Selection
Our professional sales representive and technical team will choose the right model and transmission solutions for your usage depend on your specific parameters.
• Drawing Request
If you need more product parameters, catalogues, CAD or 3D drawings, please contact us.
• On Your Need
We can modify standard products or customize them to meet your specific needs.
Product Parameters
Model Code:
| E Series | C Series | ||||
| Code | Outline dimension | General model | Code | Outline dimension | The Original code |
| 120 | Φ122 | 6E | 10C | Φ145 | 150 |
| 150 | Φ145 | 20E | 27C | Φ181 | 180 |
| 190 | Φ190 | 40E | 50C | Φ222 | 220 |
| 220 | Φ222 | 80E | 100C | Φ250 | 250 |
| 250 | Φ244 | 110E | 200C | Φ345 | 350 |
| 280 | Φ280 | 160E | 320C | Φ440 | 440 |
| 320 | Φ325 | 320E | 500C | Φ520 | 520 |
| 370 | Φ370 | 450E | |||
Gear Ratio:
| E Series | C Series | ||
| Code | Reduction Ratio | New code | Monomer reduction ratio |
| 120 | 43,53.5,59,79,103 | 10CBX | 27.00 |
| 150 | 81,105,121,141,161 | 27CBX | 36.57 |
| 190 | 81,105,121,153 | 50CBX | 32.54 |
| 220 | 81,101,121,153 | 100CBX | 36.75 |
| 250 | 81,111,161,175.28 | 200CBX | 34.86 |
| 280 | 81,101,129,145,171 | 320CBX | 35.61 |
| 320 | 81,101,118.5,129,141,171,185 | 500CBX | 37.34 |
| 370 | 81,101,118.5,129,154.8,171,192.4 | ||
| Note 1: E series,such as by the shell(pin shell)output,the corresponding reduction ratio by 1 | |||
| Note 2: C series gear ratio refers to the motor installed in the casing of the reduction ratio,if installed on the output flange side,the corresponding reduction ratio by 1 | |||
Type Of RV Reducer
Application Of RV Reeducer
Precision Cycloidal Gearbox is widely used in industrial machinery fields such as machine tool of four-5-axis, pick-up manipulator for die-casting, industrial robot, die-casting feeding machine, manipulator for punching machine, AGV driver, bottle-making machine, UV Printer and etc.
Other Products
Company Profile
| Application: | Machinery |
|---|---|
| Hardness: | Hardened Tooth Surface |
| Installation: | Vertical Type |
| Layout: | Coaxial |
| Gear Shape: | Cylindrical Gear |
| Step: | Double-Step |
| Customization: |
Available
| Customized Request |
|---|

The Cyclonoidal Gearbox
Basically, the cycloidal gearbox is a gearbox that uses a cycloidal motion to perform its rotational movement. It is a very simple and efficient design that can be used in a variety of applications. A cycloidal gearbox is often used in applications that require the movement of heavy loads. It has several advantages over the planetary gearbox, including its ability to be able to handle higher loads and higher speeds.
Dynamic and inertial effects of a cycloidal gearbox
Several studies have been conducted on the dynamic and inertial effects of a cycloidal gearbox. Some of them focus on operating principles, while others focus on the mathematical model of the gearbox. This paper examines the mathematical model of a cycloidal gearbox, and compares its performance with the real-world measurements. It is important to have a proper mathematical model to design and control a cycloidal gearbox. A cycloidal gearbox is a two-stage gearbox with a cycloid disc and a ring gear that revolves around its own axis.
The mathematical model is made up of more than 1.6 million elements. Each gear pair is represented by a reduced model with 500 eigenmodes. The eigenfrequency for the spur gear is 70 kHz. The modally reduced model is a good fit for the cycloidal gearbox.
The mathematical model is validated using ABAQUS software. A cycloid disc was discretized to produce a very fine model. It requires 400 element points per tooth. It was also verified using static FEA. This model was then used to model the stiction of the gears in all quadrants. This is a new approach to modelling stiction in a cycloidal gearbox. It has been shown to produce results comparable to those of the EMBS model. The results are also matched by the elastic multibody simulation model. This is a good fit for the contact forces and magnitude of the cycloid gear disc. It was also found that the transmission accuracy between the cycloid gear disc and the ring gear is about 98.5%. However, this value is lower than the transmission accuracy of the ring gear pair. The transmission error of the corrected model is about 0.3%. The transmission accuracy is less because of the lower amount of elastic deformation on the tooth flanks.
It is important to note that the most accurate contact forces for each tooth of a cycloid gearbox are not smooth. The contact force on a single tooth starts with a linear rise and then ends with a sharp drop. It is not as smooth as the contact force on a point contact, which is why it has been compared to the contact force on an ellipse contact. However, the contact on an ellipse contact is still relatively small, and the EMBS model is not able to capture this.
The FE model for the cycloid disc is about 1.6 million elements. The most important part of the FE model is the discretization of the cycloid disc. It is very important to do the discretization of the cycloid gear disc very carefully because of the high degree of vibration that it experiences. The cycloid disc has to be discretized finely so that the results are comparable to those of a static FEA. It has to be the most accurate model possible in order to be able to accurately simulate the contact forces between the cycloid disc and the ring gear.
Kinematics of a cycloidal drive
Using an arbitrary coordinate system, we can observe the motion of components in a cycloidal gearbox. We observe that the cycloidal disc rotates around fixed pins in a circle, while the follower shaft rotates around the eccentric cam. In addition, we see that the input shaft is mounted eccentrically to the rolling-element bearing.
We also observe that the cycloidal disc rotates independently around the eccentric bearing, while the follower shaft rotates around an axis of symmetry. We can conclude that the cycloidal disc plays a pivotal role in the kinematics of a cycloidal gearbox.
To calculate the efficiency of the cycloidal reducer, we use a model that is based on the non-linear stiffness of the contacts. In this model, the non-linearity of the contact is governed by the non-linearity of the force and the deformation in the contact. We have shown that the efficiency of the cycloidal reducer increases as the load increases. In addition, the efficiency is dependent on the sliding velocity and the deformations of the normal load. These factors are considered as the key variables to determine the efficiency of the cycloidal drive.
We also consider the efficiency of the cycloidal reducer with the input torque and the input speed. We can calculate the efficiency by dividing the net torque in the ring gear by the output torque. The efficiency can be adjusted to suit different operating conditions. The efficiency of the cycloidal drive is increased as the load increases.
The cycloidal gearbox is a multi-stage gearbox with a small shaft oin and a big shaft. It has 19 teeth and brass washers. The outer discs move in opposition to the middle disc, and are offset by 180 deg. The middle disc is twice as massive as the outer disc. The cycloidal disc has nine lobes that move by one lobe per drive shaft revolution. The number of pins in the disc should be smaller than the number of pins in the surrounding pins.
The input shaft drives an eccentric bearing that is able to transmit the power to the output shaft. In addition, the input shaft applies forces to the cycloidal disk through the intermediate bearing. The cycloidal disk then advances in 360 deg/pivot/roller steps. The output shaft pins then move around in the holes to make the output shaft rotate continuously. The input shaft applies a sinusoidal motion to maintain the constant speed of the base shaft. This sine wave causes small adjustments to the follower shaft. The forces applied to the internal sleeves are a part of the equilibrium mechanism.
In addition, we can observe that the cycloidal drive is capable of transmitting a greater torque than the planetary gear. This is due to the cycloidal gear’s larger axial length and the ring gear’s smaller hole diameter. It is also possible to achieve a positive fit between the fixed ring and the disc, which is achieved by toothing between the fixed ring and the disc. The cycloidal disk is usually designed with a short cycloid to minimize unbalance forces at high speeds.
Comparison with planetary gearboxes
Compared to planetary gearboxes, the cycloidal gearbox has some advantages. These advantages include: low backlash, better overload capacity, a compact design, and the ability to perform in a wide range of applications. The cycloidal gearbox has become popular in the multi-axis robotics market. The gearbox is also increasingly used in first joints and positioners.
A cycloidal gearbox is a gearbox that consists of four basic components: a cycloid disk, an output flange, a ring gear, and a fixed ring. The cycloid disk is driven by an eccentric shaft, which advances in a 360deg/pivot/roller step. The output flange is a fixed pin disc that transmits the power to the output shaft. The ring gear is a fixed ring, and the input shaft is connected to a servomotor.
The cycloidal gearbox is designed to control inertia in highly dynamic situations. These gearboxes are generally used in robotics and positioners, where they are used to position heavy loads. They are also commonly used in a wide range of industrial applications. They have higher torque density and a low backlash, making them ideal for heavy loads.
The output flange is also designed to handle a torque of up to 500 Nm. Its rotational speed is lower than the planet gearbox, but its output torque is much higher. It is designed to be a high-performance gearbox, and it can be used in applications that need high ratios and a high level of torque density. The cycloid gearbox is also less expensive and has less backlash. However, the cycloidal gearbox has disadvantages that should be considered when designing a gearbox. The main problem is vibrations.
Compared to planetary gearboxes, cycloidal gearboxes have a smaller overall size and are less expensive. In addition, the cycloid gearbox has a large reduction ratio in one stage. In general, cycloidal gearboxes have single or two stages, with the third stage being less common. However, the cycloid gearbox is not the only type of gearbox that has this type of configuration. It is also common to find a planetary gearbox with a single stage.
There are several different types of cycloidal gearboxes, and they are often referred to as cycloidal speed reducers. These gearboxes are designed for any industry that uses servos. They are shorter than planetary gearboxes, and they are larger in diameter for the same torque. Some of them are also available with a ratio lower than 30:1.
The cycloid gearbox can be a good choice for applications where there are high rotational speeds and high torque requirements. These gearboxes are also more compact than planetary gearboxes, and are suitable for high-torque applications. In addition, they are more robust and can handle shock loads. They also have low backlash, and a higher level of accuracy and positioning accuracy. They are also used in a wide range of applications, including industrial robotics.

editor by CX 2023-10-25
China Professional New Gear CZPT 90 Planetary Gearbox for Servo Motor Stepper Motor cycloidal gearbox manufacturers
Product Description
SAE/SAF Planetary gearboxs with higher precision:
1.-Planetary gearbox is a widely used industrial product, which can reduce the speed of motor and increase the output torque. Planetary reducer can be used as supporting parts in lifting, excavation, transportation, construction and other industries.
2.SAE/SAF Series Planetary Gearbox additionally adds front and rear oil seals, uses the output shaft double support structure and design of helix gear, which makes the gear meshing smoother and stable, the SAE/SAF Series can be used in various control transmission fields with servo motors. The backlash of the AE series is less than 5 arc.min and the reduction ratio covers 3~100.
The Product Advantages of Planetary Gearbox:
1.Flexible structure design, in line with various working conditions.
2.Ring gear processing technology: Using internal gear slotting machine and hobbling machine; the precision of ring gear after processing can reach GB7.
3.Hardened gear secondary scraping technology: secondary high-speed dry cutting of gear eliminates gear deformation caused by heat treatment. Gear accuracy can reach GB6.
4.Reliable backlash testing.
|
Shipping Cost:
Estimated freight per unit. |
To be negotiated |
|---|
| Application: | Motor, Machinery |
|---|---|
| Function: | Speed Reduction |
| Layout: | Cycloidal |
| Customization: |
Available
| Customized Request |
|---|

The Advantages of Using a Cyclone Gearbox
Using a cycloidal gearbox to drive an input shaft is a very effective way to reduce the speed of a machine. It does this by reducing the speed of the input shaft by a predetermined ratio. It is capable of very high ratios in relatively small sizes.
Transmission ratio
Whether you’re building a marine propulsion system or a pump for the oil and gas industry, there are certain advantages to using cycloidal gearboxes. Compared to other gearbox types, they’re shorter and have better torque density. These gearboxes also offer the best weight and positioning accuracy.
The basic design of a cycloidal gearbox is similar to that of a planetary gearbox. The main difference is in the profile of the gear teeth.
Cycloid gears have less tooth flank wear and lower Hertzian contact stress. They also have lower friction and torsional stiffness. These advantages make them ideal for applications that involve heavy loads or high-speed drives. They’re also good for high gear ratios.
In a cycloidal gearbox, the input shaft drives an eccentric bearing, while the output shaft drives the cycloidal disc. The cycloidal disc rotates around a fixed ring, and the pins of the ring gear engage the holes in the disc. The pins then drive the output shaft as the disc rotates.
Cycloid gears are ideal for applications that require high gear ratios and low friction. They’re also good for applications that require high torsional stiffness and shock load resistance. They’re also suitable for applications that require a compact design and low backlash.
The transmission ratio of a cycloidal gearbox is determined by the number of lobes on the cycloidal disc. The n=n design of the cycloidal disc moves one lobe per revolution of the input shaft.
Cycloid gears can be manufactured to reduce the gear ratio from 30:1 to 300:1. These gears are suitable for high-end applications, especially in the automation industry. They also offer the best positioning accuracy and backlash. However, they require special manufacturing processes and require non-standard characteristics.
Compressive force
Compared with conventional gearboxes, the cycloidal gearbox has a unique set of kinematics. It has an eccentric bearing in a rotating frame, which drives the cycloidal disc. It is characterized by low backlash and torsional stiffness, which enables geared motion.
In this study, the effects of design parameters were investigated to develop the optimal design of a cycloidal reducer. Three main rolling nodes were studied: a cycloidal disc, an outer race and the input shaft. These were used to analyze the motion related dynamic forces, which can be used to calculate stresses and strains. The gear mesh frequency was calculated using a formula, which incorporated a correction factor for the rotating frame of the outer race.
A three-dimensional finite element analysis (FEA) study was conducted to evaluate the cycloidal disc. The effects of the size of the holes on the disc’s induced stresses were investigated. The study also looked at the torque ripple of a cycloidal drive.
The authors of this study also explored backlash distribution in the output mechanism, which took into account the machining deviations and structure and geometry of the output mechanism. The study also looked at the relative efficiency of a cycloidal reducer, which was based on a single disc cycloidal reducer with a one-tooth difference.
The authors of this study were able to deduce the contact stress of the cycloidal disc, which is calculated using the material-based contact stiffness. This can be used to determine accurate contact stresses in a cycloidal gearbox.
It is important to know the ratios needed for calculation of the bearing rate. This can be calculated using the formula f = k (S x R) where S is the volume of the element, R is the mass, k is the contact stiffness and f is the force vector.
Rotational direction
Unlike the conventional ring gear which has a single axis of rotation, cycloidal gearbox has three rotational axes which are parallel and are located in a single plane. A cycloidal gearbox has excellent torsional stiffness and shock load capacity. It also ensures constant angular velocity, and is used in high-speed gearbox applications.
A cycloidal gearbox consists of an input shaft, a drive member and a cycloidal disc. The disc rotates in one direction, while the input shaft rotates in the opposite direction. The input shaft eccentrically mounts to the drive member. The cycloidal disc meshes with the ring-gear housing, and the rotational motion of the cycloidal disc is transferred to the output shaft.
To calculate the rotational direction of a cycloidal gearbox, the cycloid must have the correct angular orientation and the centerline of the cycloid should be aligned with the center of the output hole. The cycloid’s shortest length should be equal to the radius of the pin circle. The cycloid’s largest radius should be the size of the bearing’s exterior diameter.
A single-stage gear will not have much space to work with, so you’ll need a multistage gear to maximize space. This is also the reason that cycloid gears are usually designed with a shortened cycloid.
To calculate the most efficient tooth profile for a cycloidal gear, a new method was devised. This method uses a mathematical model that uses the cycloid’s rotational direction and a few other geometric parameters. Using a piecewise function related to the distribution of pressure angle, the cycloid’s most efficient profile is determined. It is then superimposed on the theoretical profile. The new method is much more flexible than the conventional method, and can adapt to changing trends of the cycloidal profile.
Design
Several designs of cycloidal gearboxes have been developed. These gearboxes have a large reduction ratio in one stage. They are mainly used for heavy machines. They provide good torsional stiffness and shock load capacity. However, they also have vibrations at high RPM. Several studies have been conducted to find a solution to this problem.
A cycloidal gearbox is designed by calculating the reduction ratio of a mechanism. This ratio is obtained by the size of the input speed. This is then multiplied by the reduction ratio of the gear profile.
The most important factor in the design of a cycloidal gearbox is the load distribution along the width of the gear. Using this as a design criterion, the amplitude of vibration can be reduced. This will ensure that the gearbox is working properly. In order to generate proper mating conditions, the trochoidal profile on the cycloidal disc periphery must be defined accurately.
One of the most common forms of cycloidal gears is circular arc toothing. This is the most common type of toothing used today.
Another form of gear is the hypocycloid. This form requires the rolling circle diameter to be equal to half the base circle diameter. Another special case is the point tooth form. This form is also called clock toothing.
In order to make this gear profile work, the initial point of contact must remain fixed to the edge of the rolling disk. This will generate the hypocycloid curve. The curve is traced from this initial point.
To investigate this gear profile, the authors used a 3D finite element analysis. They used the mathematical model of gear manufacturing that included kinematics parameters, output moment calculations, and machining steps. The resulting design eliminated backlash.
Sizing and selection
Choosing a gearbox can be a complex task. There are many factors that need to be taken into account. You need to determine the type of application, the required speed, the load, and the ratio of the gearbox. By gaining this information, you can find a solution that works best for you.
The first thing you need to do is find the proper size. There are several sizing programs available to help you determine the best gearbox for your application. You can start by drawing a cycloidal gear to help you create the part.
During sizing, it is important to consider the environment. Shock loads, environmental conditions, and ambient temperatures can increase wear on the gear teeth. The temperature also has a significant impact on lubrication viscosities and seal materials.
You also need to consider the input and output speed. This is because the input speed will change your gearbox ratio calculations. If you exceed the input speed, you can damage the seals and cause premature wear on the shaft bearings.
Another important aspect of sizing is the service factor. This factor determines the amount of torque the gearbox can handle. The service factor can be as low as 1.4, which is sufficient for most industrial applications. However, high shock loads and impact loads will require higher service factors. Failure to account for these factors can lead to broken shafts and damaged bearings.
The output style is also important. You need to determine if you want a keyless or keyed hollow bore, as well as if you need an output flange. If you choose a keyless hollow bore, you will need to select a seal material that can withstand the higher temperatures.
editor by CX 2023-05-18
China high quality Crawlspace Robot Uses Flange Output Low Noise and High Torque Servo Gearbox cycloidal gearbox design
Product Description
Product Description
crawlspace robot uses Flange output Low noise and high torque servo gearbox for 5 axis machining center developed and manufactured by WEITENSTAN together with German and ZheJiang technicians for many years.
High precision miniature cycloidal gearbox has the characteristics of smaller, ultra-thin, lightweight and high rigidity, anti-overload and high torque. With good deceleration performance, smooth operation and accurate positioning can be achieved. Integrated design, can be directly connected with the motor, to achieve high precision, high rigidity, high durability and other advantages. It is designed for high speed ratio, high geometric accuracy, low motion loss, large torque capacity and high stiffness applications. The compact design (minimum OD ≈40mm, currently the world’s smallest precision cycloidal pin-wheel reducer) allows it to be installed in limited Spaces.
Reducer drawings
Detailed Photos
Product Advantage
crawlspace robot uses Flange output Low noise and high torque servo gearbox advantages:
1, fine precision cycloidal structure
Ultra flat shape is achieved through differential reduction mechanism and thin cross roller bearing, contributing to the compact size of the equipment. The combination of small size and unmatched superior parameters achieves the best combination of performance, price and size (high cost performance).
2. Excellent accuracy (transmission loss ≤1 arcmin)
Through the complex meshing of precision cycloid gear and high precision roller pin, higher transmission accuracy is achieved while maintaining small size and high speed ratio.
3, high rigidity
Increase the mesh rate to disperse the load, so the rigidity is high.
4. High overload capacity
It maintains trouble-free operation under abnormally low noise and vibration conditions while ensuring excellent overturning and torsional stiffness parameters. Integrated axial radial cross roller bearings, high load capacity and overload capacity of the reducer, can ensure users to provide a variety of temperature range of applications.
5, the motor installation is simple
Electromechanical integration design, can be directly connected with the motor, any brand of motor can be installed directly, without adding any device.
6. Maintenance free
Seal grease to achieve maintenance free. No refueling, no mounting direction restrictions.
7, stable performance
The manufacturing process of high wear-resistant materials and high precision parts has been certified by ISO9000 quality system, which guarantees the reliable operation of the reducer.
Product Classification
WF Series
High Precision Miniature Reducer
WF series is a high precision micro cycloidal reducer with flange, which has a wide range of applications. This series of reducers includes precise reduction mechanisms and radial – axial roller bearings. The unique design allows load to act directly on the output flange or housing without additional bearings. WF series reducer is characterized by module design, can be installed through the flange motor and reducer, belongs to the motor directly connected reducer.
WFH Series
High Precision Miniature Reducer
WFH series is a hollow form of high precision miniature cycloidal reducer, wire, compressed air pipeline, drive shaft can be through the hollow shaft, non-motor direct connection type reducer. The WFH series is fully sealed, full of grease and includes precise deceleration mechanism and radial – axial roller bearings. The unique design allows load to be acted directly on the output flange or housing without additional bearings.
Product Parameters
| Size | reduction ratio | Rated output moment | Allowable torque of start and stop | Instantaneous allowable moment | Rated input speed | Maximum input speed | Tilt stiffness | Torsional stiffness | No-load starting torque | Transmission accuracy | Error accuracy | Moment of inertia | Weight | |
| Axis rotation | Shell rotation | Nm | Nm | Nm | rpm | rpm | Nm/arcmin | Nm/arcmin | Nm | arcmin | arcmin | kg-m² | kg | |
| WF07 | 21 | 20 | 15 | 30 | 45 | 3000 | 6000 | 6 | 1.1 | 0.12 | P1≤±1 P2≤±3 | P1≤±1 P2≤±3 | 0.52 | 0.42 |
| 41 | 40 | 0.11 | 0.47 | |||||||||||
| WF17 | 21 | 20 | 50 | 100 | 150 | 3000 | 6000 | 28 | 6 | 0.21 | P1≤±1 P2≤±3 | P1≤±1 P2≤±3 | 0.88 | 0.85 |
| 41 | 40 | 0.18 | 0.72 | |||||||||||
| 61 | 60 | 0.14 | 0.69 | |||||||||||
| WF25 | 21 | 20 | 110 | 220 | 330 | 3000 | 5500 | 131 | 24 | 0.47 | P1≤±1 P2≤±3 | P1≤±1 P2≤±3 | 6.12 | 2 |
| 31 | 30 | 0.41 | 5.67 | |||||||||||
| 41 | 40 | 0.38 | 4.9 | |||||||||||
| 51 | 50 | 0.35 | 4.56 | |||||||||||
| 81 | 80 | 0.31 | 4.25 | |||||||||||
| WF32 | 25 | 24 | 190 | 380 | 570 | 3000 | 4500 | 240 | 35 | 1.15 | P1≤±1 P2≤±3 | P1≤±1 P2≤±3 | 11 | 4.2 |
| 31 | 30 | 1.1 | 10.8 | |||||||||||
| 51 | 50 | 0.77 | 9.35 | |||||||||||
| 81 | 80 | 0.74 | 8.32 | |||||||||||
| 101 | 100 | 0.6 | 7.7 | |||||||||||
| WF40 | 25 | 24 | 320 | 640 | 960 | 3000 | 4000 | 377 | 50 | 1.35 | P1≤±1 P2≤±3 | P1≤±1 P2≤±3 | 13.2 | 6.6 |
| 31 | 30 | 1.32 | 12.96 | |||||||||||
| 51 | 50 | 0.92 | 11.22 | |||||||||||
| 81 | 80 | 0.81 | 9.84 | |||||||||||
| 121 | 120 | 0.72 | 8.4 | |||||||||||
Installation Instructions
Company Profile
Q: Speed reducer grease replacement time
A: When sealing appropriate amount of grease and running reducer, the standard replacement time is 20000 hours according to the aging condition of the grease. In addition, when the grease is stained or used in the surrounding temperature condition (above 40ºC), please check the aging and fouling of the grease, and specify the replacement time.
Q: Delivery time
A: Fubao has 2000+ production base, daily output of 1000+ units, standard models within 7 days of delivery.
Q: Reducer selection
A: Fubao provides professional product selection guidance, with higher product matching degree, higher cost performance and higher utilization rate.
Q: Application range of reducer
A: Fubao has a professional research and development team, complete category design, can match any stepping motor, servo motor, more accurate matching.
|
Shipping Cost:
Estimated freight per unit. |
To be negotiated |
|---|
| Application: | Motor, Machinery, Agricultural Machinery, Cartesian Robot |
|---|---|
| Hardness: | Hardened Tooth Surface |
| Installation: | Vertical Type |
| Customization: |
Available
| Customized Request |
|---|
The Basics of a Cyclone Gearbox
Besides being compact, cycloidal speed reducers also offer low backlash and high ratios. Because of the small size of the drive, they are ideal for applications where space is a problem.
Involute gear tooth profile
Almost all gears use an involute gear tooth profile. This profile has a single curve, which means that the gear teeth do not have to be aligned closely with each other. This profile is smooth and can be manufactured easily.
Cycloid gears have a combination of epicycloid and hypocycloid curves. This makes them stronger than involute gear teeth. However, they can be more expensive to manufacture. They also have larger reduction ratios. They transmit more power than involute gears. Cycloid gears can be found in clocks.
When designing a gear, you need to consider several factors. Some of these include the number of teeth, the tooth angle and the lubrication type. Having a gear tooth that is not perfectly aligned can result in transmission error, noise and vibration.
The tooth profile of an involute gear is usually considered the best. Because of this, it is used in a wide variety of gears. Some of the most common applications for this profile are power transmission gears. However, this profile is not the best for every application.
Cycloid gears require more complex manufacturing processes than involute gear teeth. This can cause a larger tooth cost. Cycloid gears are used for less noisy applications.
Cycloid gears also transmit more power than involute gears. This can cause problems if the radii change tangentially. However, the shape is more simple than involute gears. Involute gears can handle centre sifts better.
Cycloid gears are less susceptible to transmission error. Cycloid gears have a convex surface, which makes them stronger than involute teeth. Cycloid gears also have a larger reduction ratio than involute gears. Cycloid teeth do not interfere with the mating teeth. However, they have a smaller number of teeth than involute teeth.
Rotation on the inside of the reference pitch circle of the pins
Whether a cycloidal gearbox is designed for stationary or rotating applications, the fundamental law of gearing must be observed: The ratio of angular velocities must be constant. This requires the rotation on the inside of the reference pitch circle of the pins to be constant. This is achieved through a series of cycloidal teeth, which act like tiny levers to transmit motion.
A cycloidal disc has N lobes which are rotated by three lobes per rotation around N pins. The number of lobes on a cycloidal disc is a significant factor in determining the transmission ratio.
A cycloidal disc is driven by an eccentric input shaft which is mounted to an eccentric bearing within an output shaft. As the input shaft rotates, the cycloidal disc moves around the pins of the pin disc.
The drive pin rotates at a 40 deg angle while the cycloidal disc rotates on the inside of the reference pitch circle of pins. As the drive pin rotates, it will slow the output motion. This means that the output shaft will complete only three revolutions with the input shaft, as opposed to nine revolutions with the input shaft.
The number of teeth on a cycloidal disc must be small compared to the number of surrounding pins. The disc must also be constructed with an eccentric radius. This will determine the size of the hole which will be required for the pin to fit between the pins.
When the input shaft is turned, the cycloidal disc will rotate on the inside of the reference pitch circle of roller pins. This will then transmit motion to the output shaft. The output shaft is supported by two bearings in an output housing. This design has low wear and torsional stiffness.
Transmission ratio
Choosing the right transmission ratio of cycloidal gearbox isn’t always easy. You might need to know the size of your gearbox before you can make an educated choice. You may also need to refer to the product catalog for guidance. For example, CZPT gearboxes have some unique ratios.
A cycloidal gear reducer is a compact and high-speed torque transmission device that reverses the direction of angular movement of the follower shaft. It consists of an eccentric cam positioned inside a cycloidal disc. Pin rollers on the follower shaft fit into matching holes in the cycloidal disc. In the process, the pins slide around the holes, in response to wobbling motion. The cycloidal disc is also capable of engaging the internal teeth of a ring-gear housing.
A cycloidal gear reducer can be used in a wide variety of applications, including industrial automation, robotics and power transmissions on boats and cranes. A cycloidal gear reducer is ideally suited for heavy duty applications with large payloads. They require specialized manufacturing processes, and are often used in equipment with precise output and high efficiency.
The cycloidal gear reducer is a relatively simple structure, but it does require some special tools. Cycloid gear reducers are also used to transmit torque, which is one of the reasons they are so popular in automation. Using a cycloidal gear reducer is a good choice for applications that require higher efficiency and lower backlash. It is also a good choice for applications where size is a concern. Cycloid gears are also a good choice for applications where high speed and high torque are required.
The transmission ratio of cycloidal gearbox is probably the most important function of a gearbox. You need to know the size of your gearbox and the type of gears it contains in order to make the right choice.
Vibration reduction
Considering the unique dynamics of a cycloidal gearbox, vibration reduction measures are required for a smooth operation. These measures can also help with the detection of faults.
A cycloidal gearbox is a gearbox with an eccentric bearing that rotates the center of the gears. It shares torque load with five outer rollers at any given time. It can be applied in many applications. It is a relatively inexpensive asset. However, if it fails, it can have significant economic impacts.
A typical input/output gearbox consists of a ring plate and two cranks mounted on the input shaft. The ring plate rotates when the input shaft rotates. There are two bearings on the output shaft.
The ring plate is a major noise source because it is not balanced. The cycloidal gear also produces noise when it meshes with the ring plate. This noise is generated by structural resonance. Several studies have been performed to solve this problem.
However, there is not much documented work on the condition monitoring of cycloidal gearboxes. In this article, we will introduce modern techniques for vibration diagnostics.
A cycloidal gearbox with a reduced reduction ratio has higher induced stresses in the cycloidal disc. In this case, the size of the output hole is larger and more material is removed from the cycloidal disc. This increase in the disc’s stresses leads to higher vibration amplitudes.
The load distribution along the width of the gear is an important design criterion. Using different gear profiles can help to optimize the transmission of torque. The contact stress of the cycloidal disc can also be investigated.
To determine the amplitude of the noise, the frequency of the gear mesh is multiplied by the shaft rate. If the RPM is relatively stable, the frequency can be used as a measure of magnitude. However, this is only accurate at close to failure.
Comparison with planetary gearboxes
Several differences exist between cycloidal gearboxes and planetary gearboxes. They are related to gear geometry and manufacturing processes. Among them, there are:
– The output shaft of a cycloidal gearbox has a larger torque than the input shaft. The rotational speed of the output shaft is lower than the input shaft.
– The cycloid gear disc rotates at variable velocity, while the planetary gear has a fixed speed. Consequently, the cycloid disc and output flange transmission accuracy is lower than that of the planetary gears.
– The cycloidal gearbox has a larger gripping area than the planetary gear. This is an advantage of the cycloidal gearbox in that it can handle larger loads.
– The cycloid profile has a significant impact on the quality of contact meshing between the tooth surfaces. The width of the contact ellipses increases by 90%. This is a result of the elimination of undercuts of the lobes. In this way, the contact force on the cycloid disc is decreased significantly.
– The cycloid drive has lower backlash and high torsional stiffness. This allows a cycloidal drive to be more stable against shock loads. The cycloid drive is also a compact design, which is ideally suited for applications with large transmission ratios.
– The output hub of the cycloid gearbox has movable pins and rollers. These components are attached to the ring gear in the outer gearbox. The output shaft is also turned by the planet carrier. The output hub of the cycloid system is composed of two parts: the ring gear and the output flange.
– The input shaft of a cycloidal gearbox is connected to a servomotor. The input shaft is a cylindrical element that is fixed to the planet carrier.
editor by CX 2023-05-17
China manufacturer Reducer Production Factory for Sale Helical Gear 1.5kw Servo Motor Transmission Gearbox cycloidal pin gear reducer
Product Description
Product Description
Reducer production factory For sale helical gear 1.5KW servo motor transmission gearbox
DA series precision square flange high precision reducer. Reducer bearings are CZPT brand, gear after carbonization treatment, so the accuracy and rigidity are superior! Reducer output shaft is customized size and length according to customer requirements.
Fubao planetary gear box manufacturer, the supply of high-precision planetary reducer has the following advantages:
1, compact structure: the characteristics of large torque planetary reducer is to make full use of space, limited space design bearing and gear ratio, so that the product is smaller than the traditional reducer volume can save space.
2, high efficiency: the planetary gear group will be in a completely tight meshing state when running, reducing gear collision or local meshing resulting in gear damage. The completely tight meshing characteristic makes the efficiency loss of each gear transmission only 3%. This type of transmission mode can ensure that the kinetic energy input reducer to the mechanical end of the process, still can maintain high transmission efficiency, avoid the internal gear friction, sliding, mechanical loss.
3, high axial and radial load capacity: the output shaft of Fubao technology’s high-torque planetary reducer adopts a large-span style, so that the bearing is configured at both ends of the output shaft. The design can effectively disperse the force acting on the output shaft and reduce the load of the bearing. In other words, the product strengthens the bearing and radial load capacity under the same size.
4, high strength: large torque planetary reducer gear group is very strong and stable, the thickness of the gear dispersed the load on the gear. The large span bearing group provides a stable structure, and the precision gear group allows the load to be distributed to each planetary gear under tight meshing to withstand the torque load.
5, high stability: precision processing to ensure that the product coaxial and concentric, coupled with bearing large span design, so that large torque planetary reducer with excellent stability.
Detailed Photos
Product Classification
Company Profile
Factory Display
Q: Speed reducer grease replacement time
A: When sealing appropriate amount of grease and running reducer, the standard replacement time is 20000 hours according to the aging condition of the grease. In addition, when the grease is stained or used in the surrounding temperature condition (above 40ºC), please check the aging and fouling of the grease, and specify the replacement time.
Q: Delivery time
A: Fubao has 2000+ production base, daily output of 1000+ units, standard models within 7 days of delivery.
Q: Reducer selection
A: Fubao provides professional product selection guidance, with higher product matching degree, higher cost performance and higher utilization rate.
Q: Application range of reducer
A: Fubao has a professional research and development team, complete category design, can match any stepping motor, servo motor, more accurate matching.
|
Shipping Cost:
Estimated freight per unit. |
To be negotiated |
|---|
| Application: | Motor, Machinery, Agricultural Machinery, Mechanical Equipment |
|---|---|
| Function: | Distribution Power, Change Drive Torque, Speed Changing, Speed Reduction, Reduce Motor Speed |
| Layout: | Cycloidal |
| Customization: |
Available
| Customized Request |
|---|

How to Calculate Transmission Ratio for a Cycloidal Gearbox
Using a cycloidal gearbox can be very useful in a wide variety of situations. However, it’s important to understand how to use it properly before implementing it. This article discusses the benefits of using a cycloidal gearbox, how to calculate the transmission ratio, and how to determine the effects of dynamic and inertial forces on the gearbox.
Dynamic and inertial effects
Various studies have been done to study the dynamic and inertial effects of cycloidal gearboxes. These studies have been performed using numerical, analytical and experimental methods. Depending on the nature of the load and its distribution along the gear, a variety of models have been developed. These models use finite element method to determine accurate contact stresses. Some of these models have been developed to address the nonlinear elasticity of contacts.
Inertial imbalance in a cycloidal gearbox causes vibration and can affect the efficiency of the device. This can increase mechanical losses and increase wear and tear. The efficiency of the device also depends on the torque applied to the cycloidal disk. The effectiveness of the device increases as the load increases. Similarly, the nonlinear contact dynamics are also associated with an increase in efficiency.
A new model of a cycloidal reducer has been developed to predict the effects of several operational conditions. The model is based on rigid body dynamics and uses a non-linear stiffness coefficient. The model has been validated through numerical and analytical methods. The model offers drastic reduction in computational costs. The model allows for a quick analysis of several operational conditions.
The main contribution of the paper is the investigation of the load distribution on the cycloidal disc. The study of this aspect is important because it allows for an analysis of the rotating parts and stresses. It also provides an indication of which gear profiles are best suited for optimizing torque transmission. The study has been conducted with a variety of cycloidal gearboxes and is useful in determining the performance of different types of cycloidal gearboxes.
To study the load distribution on the cycloidal disc, the authors investigated the relationship between contact force, cycloidal gearboxes and different gear profiles. They found that the non-linear contact dynamics have a large impact on the efficiency of a cycloidal gearbox. The cycloidal gearbox is an ideal solution for applications that involve highly dynamic servos. It can also be used in machine tool applications and food processing industries.
The study found that there are three common design principles of cycloidal reducers. These are the contact force distribution, the speed reduction and the trochoidal profile of the cycloidal disc. The trochoidal profile has to be defined carefully to ensure correct mating of the rotating parts. The trochoidal profile provides an indication of which gear profiles are best for optimizing torque transmission. The contact force distribution can be improved by refining the mesh along the disc’s width.
As the input speed increases, the efficiency of the reducer increases. This is because contact forces are constantly changing in magnitude and orientation. A cycloidal reducer with a one tooth difference can reduce input speed by up to 87:1 in a single stage. It also has the ability to handle high-cycle moves without backlash.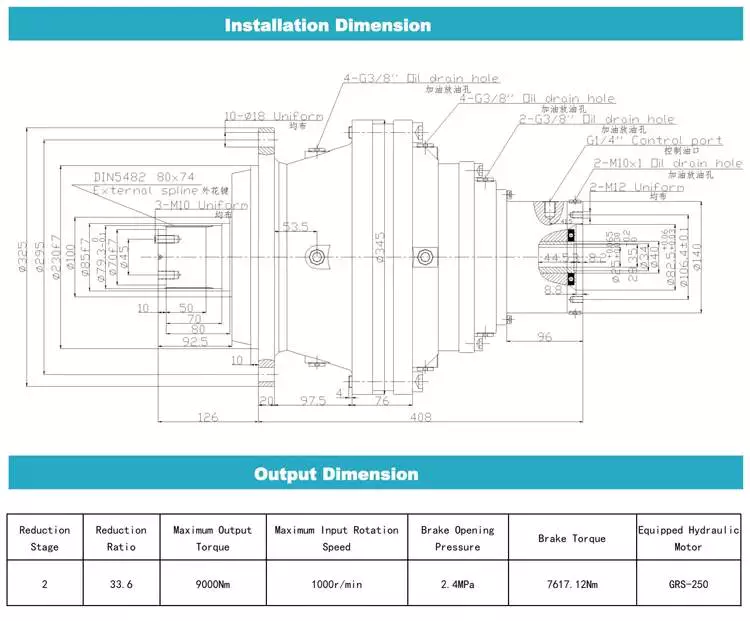
Transmission ratio calculation
Getting the correct transmission ratio calculation for a cycloidal gearbox requires a good understanding of what a gearbox is, as well as the product that it is being used for. The correct ratio is calculated by dividing the output speed of the output gear by the input speed of the input gear. This is usually accomplished by using a stopwatch. In some cases, a catalog or product specification may be required. The correct ratio is determined by a combination of factors, such as the amount of torque applied to the mechanism, as well as the size of the gears involved.
A cycloidal gear is a type of gear tooth profile that can be represented using a spline. It is also possible to model a gear with a cycloidal profile by using a spline to connect points against the beginning of a coordinate system. This is important in the design and functionality of a gear.
There are many different gears used in machines and devices. These include the herringbone gear, the helical gear and the spiral bevel gear. The best transmission ratios are typically obtained with a cycloidal gearbox. In addition to ensuring the accuracy of positioning, a cycloidal gearbox provides excellent backlash. Cycloid gears have a high degree of mechanical efficiency, low friction, and minimal moment of inertia.
A cycloidal gearbox is often referred to as a planetary gearbox, though it is technically a single-stage gearbox. In addition to having a ring gear, the gearbox has an eccentric bearing that drives the cycloidal disc in an eccentric rotation. This makes the cycloidal gearbox a good choice for high gear ratios in compact designs.
The cycloid disc is the key element of a cycloidal gearbox. The cycloid disc has n=9 lobes, and each lobe of the disc moves by a lobe for every revolution of the drive shaft. The cycloid disc is then geared to a stationary ring gear. The cycloidal disc’s lobes act like teeth on the stationary ring gear.
There are many different gears that are classified by the profile of the gear teeth. The most common gears are the involute and helical gears. Most motion control gears include spur designs. However, there are many other types of gears that are used in various applications. The cycloidal gear is one of the more complicated gears to design. The cycloid disc’s outline can be represented using markers or smooth lines, though a scatter chart will also do.
The cycloid disc’s lobes rotate on a reference pitch circle of pins. These pins rotate 40 deg during the eccentric rotation of the drive shaft. The pins rotate around the disc to achieve a steady rotation of the output shaft.
The cycloid disc’s other obvious, and possibly more important, feature is the’magic’ number of pins. This is the number of pins that protrude through the face of the disc. The disc has holes that are larger than the pins. This allows the pins to protrude through the disc and attach to the output shaft.
Application
Whether you’re building a robot drive or you’re simply looking for a gearbox to reduce the speed of your vehicle, a cycloidal gearbox is a great way to achieve a high reduction ratio. Cycloidal gearboxes are a low-friction, lightweight design that has an extremely stable transmission. They are suitable for industrial robots and can be used in many applications, including positioning robots.
Cycloidal gearboxes reduce speed by using eccentric motion. The eccentric motion enables the entire internal gear to rotate in wobbly cycloidal motion, which is then translated back into circular rotation. This eliminates the need for stacking gear stages. Cycloidal gearboxes also have less friction, higher strength, and greater durability than conventional gearboxes.
The cycloidal gearbox is also used in a number of applications, including marine propulsion systems, and robot drives. Cycloidal gearboxes reduce vibration by using offset gearing to cancel out vibrations.
Cycloidal gears have lower friction, higher strength, and better torsional stiffness than involute gears. They also have a reduced Hertzian contact stress, making them better than involute gears for use with shock loads. They also have a smaller size and weight than conventional gearboxes, and they have a higher reduction ratio than involute gears.
Cycloidal gears are typically used to reduce the speed of motors, but they also offer a number of other advantages. Cycloidal gearboxes have a smaller footprint than other gearboxes, allowing them to fit into confined spaces. They also have low backlash, allowing for precise movement. Cycloidal gears have a higher efficiency, resulting in lower power requirements and lower wear.
The cycloidal disc is one of the most important components of the gearbox. Cycloidal discs are normally designed with a short cycloid, which minimizes the eccentricity of the disc. They are also designed with a shortened flank, resulting in better strength and less stress concentration. Cycloidal discs are typically geared to a stationary ring gear. The cycloid is designed to roll around the stationary ring pins, which push against the circular holes in the disc. Cycloidal gearboxes typically employ two degrees of shift.
Cycloidal drives are ideal for heavy load applications. They also have high torsional stiffness, which makes them highly resistant to shock loads. Cycloidal drives also offer a high reduction ratio, which can be achieved without the need for a large input shaft. They are also compact and have a high service life.
The output shaft of a cycloidal gearbox always has two degrees of shifting, which ensures that the input and output shafts always rotate at a different speed. The output shaft would be a pin casing around the drive disks, which would also allow for easy maintenance.
Cycloidal gearboxes are also very compact and lightweight, so they are ideal for use in industrial robots. The cycloidal gearbox reducer is the most stable, low-vibration reducer in industrial robots, and it has a wide transmission ratio range.
editor by CX 2023-04-20
China XB Bwdxwd Transmission Gear Boxes Servo Motor Sumitomo Drive Pin Wheel Reducer Planetary Cyclo Cycloid Cycloidal Gearbox planetary gearbox
Guarantee: 1 several years, 1-2 A long time
Applicable Industries: Producing Plant, Machinery Mend Shops, Meals & Beverage Manufacturing facility, Farms, Retail, Deep groove ball bearings 10x26x8 6 Cylindrical Roller Bearings NJ316M for Aoright FAG CZPT aoright CZPT C&U the payment is: thirty% T/T in advance ,equilibrium before shippment.
Q: What is the specific MOQ or cost for your merchandise ?A: As an OEM firm, we can offer and adapt our items to a extensive assortment of requirements.Hence, MOQ and price might tremendously vary with dimensions, substance and more specifications For instance, Tractor mounted 3 point hitch wooden chipper BX42 with excellent price tag high priced merchandise or common products will generally have a reduced MOQ. Make sure you get in touch with us with all related particulars to get the most correct quotation.
Packing & Supply Adhere to Us
The Parts of a Gearbox
There are many parts of a Gearbox, and this article will help you understand its functions and components. Learn about its maintenance and proper care, and you’ll be on your way to repairing your car. The complexity of a Gearbox also makes it easy to make mistakes. Learn about its functions and components so that you’ll be able to make the best choices possible. Read on to learn more. Then, get your car ready for winter!
Components
Gearboxes are fully integrated mechanical components that consist of a series of gears. They also contain shafts, bearings, and a flange to mount a motor. The terms gearhead and gearbox are not often used interchangeably in the motion industry, but they are often synonymous. Gearheads are open gearing assemblies that are installed in a machine frame. Some newer designs, such as battery-powered mobile units, require tighter integration.
The power losses in a gearbox can be divided into no-load and load-dependent losses. The no-load losses originate in the gear pair and the bearings and are proportional to the ratio of shaft speed and torque. The latter is a function of the coefficient of friction and speed. The no-load losses are the most serious, since they represent the largest proportion of the total loss. This is because they increase with speed.
Temperature measurement is another important preventive maintenance practice. The heat generated by the gearbox can damage components. High-temperature oil degrades quickly at high temperatures, which is why the sump oil temperature should be monitored periodically. The maximum temperature for R&O mineral oils is 93degC. However, if the sump oil temperature is more than 200degF, it can cause seal damage, gear and bearing wear, and premature failure of the gearbox.
Regardless of its size, the gearbox is a crucial part of a car’s drivetrain. Whether the car is a sports car, a luxury car, or a farm tractor, the gearbox is an essential component of the vehicle. There are two main types of gearbox: standard and precision. Each has its own advantages and disadvantages. The most important consideration when selecting a gearbox is the torque output.
The main shaft and the clutch shaft are the two major components of a gearbox. The main shaft runs at engine speed and the countershaft may be at a lower speed. In addition to the main shaft, the clutch shaft has a bearing. The gear ratio determines the amount of torque that can be transferred between the countershaft and the main shaft. The drive shaft also has another name: the propeller shaft.
The gears, shafts, and hub/shaft connection are designed according to endurance design standards. Depending on the application, each component must be able to withstand the normal stresses that the system will experience. Oftentimes, the minimum speed range is ten to twenty m/s. However, this range can differ between different transmissions. Generally, the gears and shafts in a gearbox should have an endurance limit that is less than that limit.
The bearings in a gearbox are considered wear parts. While they should be replaced when they wear down, they can be kept in service much longer than their intended L10 life. Using predictive maintenance, manufacturers can determine when to replace the bearing before it damages the gears and other components. For a gearbox to function properly, it must have all the components listed above. And the clutch, which enables the transmission of torque, is considered the most important component.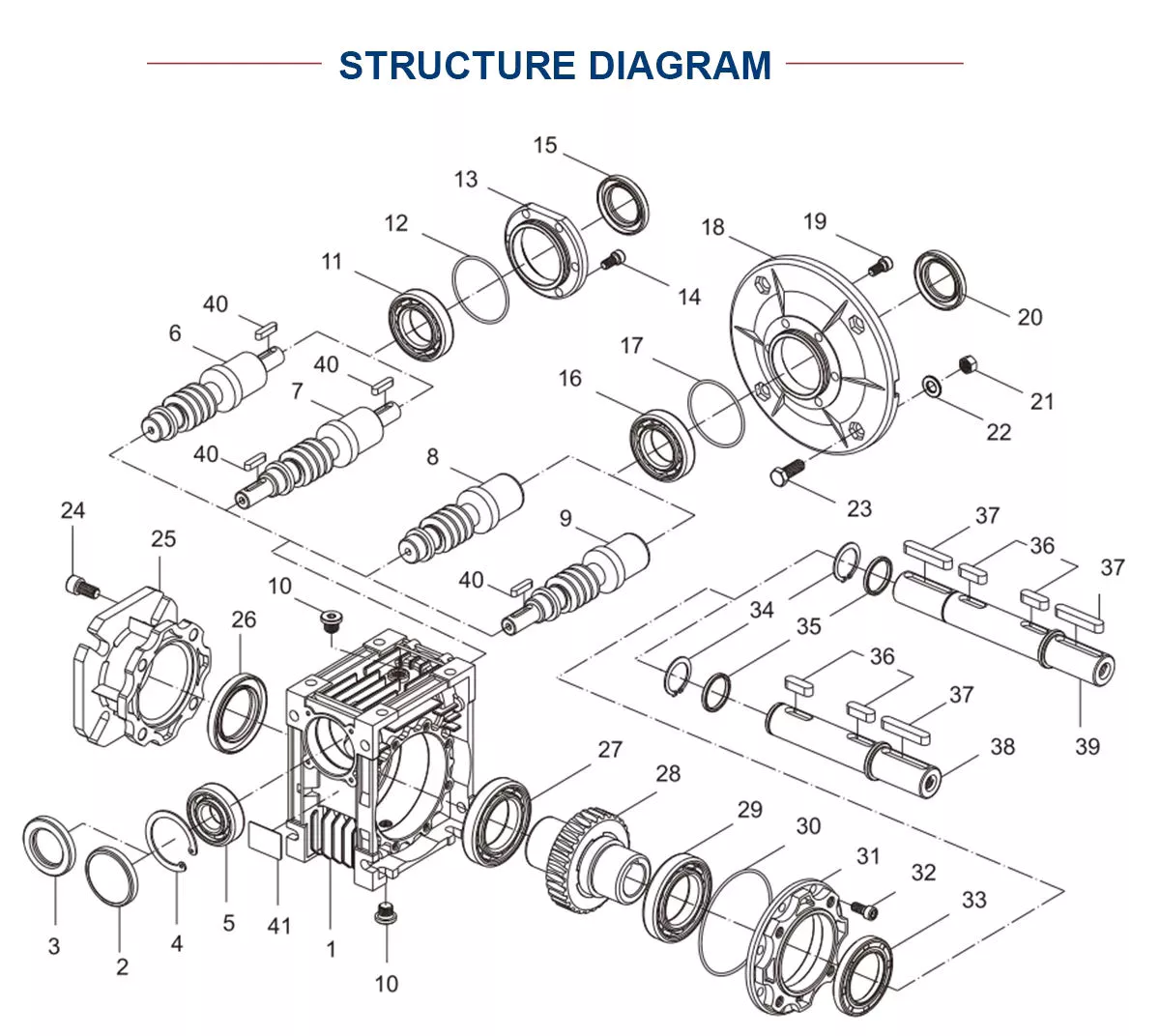
Functions
A gearbox is a fully integrated mechanical component that consists of mating gears. It is enclosed in a housing that houses the shafts, bearings, and flange for motor mounting. The purpose of a gearbox is to increase torque and change the speed of an engine by connecting the two rotating shafts together. A gearbox is generally made up of multiple gears that are linked together using couplings, belts, chains, or hollow shaft connections. When power and torque are held constant, speed and torque are inversely proportional. The speed of a gearbox is determined by the ratio of the gears that are engaged to transmit power.
The gear ratios in a gearbox are the number of steps a motor can take to convert torque into horsepower. The amount of torque required at the wheels depends on the operating conditions. A vehicle needs more torque than its peak torque when it is moving from a standstill. Therefore, the first gear ratio is used to increase torque and move the vehicle forward. To move up a gradient, more torque is required. To maintain momentum, the intermediate gear ratio is used.
As metal-to-metal contact is a common cause of gearbox failure, it is essential to monitor the condition of these components closely. The main focus of the proactive series of tests is abnormal wear and contamination, while the preventative tests focus on oil condition and additive depletion. The AN and ferrous density tests are exceptions to this rule, but they are used more for detecting abnormal additive depletion. In addition, lubrication is critical to the efficiency of gearboxes.
Maintenance
Daily maintenance is a critical aspect of the life cycle of a gearbox. During maintenance, you must inspect all gearbox connection parts. Any loose or damaged connection part should be tightened immediately. Oil can be tested using an infrared thermometer and particle counters, spectrometric analysis, or ferrography. You should check for excessive wear and tear, cracks, and oil leaks. If any of these components fail, you should replace them as soon as possible.
Proper analysis of failure patterns is a necessary part of any preventative maintenance program. This analysis will help identify the root cause of gearbox failures, as well as plan for future preventative maintenance. By properly planning preventative maintenance, you can avoid the expense and inconvenience of repairing or replacing a gearbox prematurely. You can even outsource gearbox maintenance to a company whose experts are knowledgeable in this field. The results of the analysis will help you create a more effective preventative maintenance program.
It is important to check the condition of the gearbox oil periodically. The oil should be changed according to its temperature and the hours of operation. The temperature is a significant determinant of the frequency of oil changes. Higher temperatures require more frequent changes, and the level of protection from moisture and water reduces by 75%. At elevated temperatures, the oil’s molecular structure breaks down more quickly, inhibiting the formation of a protective film.
Fortunately, the gear industry has developed innovative technologies and services that can help plant operators reduce their downtime and ensure optimal performance from their industrial gears. Here are 10 steps to ensure that your gearbox continues to serve its purpose. When you are preparing for maintenance, always keep in mind the following tips:
Regular vibration analysis is a vital part of gearbox maintenance. Increased vibration signals impending problems. Visually inspect the internal gears for signs of spiraling and pitting. You can use engineers’ blue to check the contact pattern of gear teeth. If there is a misalignment, bearings or housings are worn and need replacement. Also make sure the breathers remain clean. In dirty applications, this is more difficult to do.
Proper lubrication is another key factor in the life of gearboxes. Proper lubrication prevents failure. The oil must be free of foreign materials and have the proper amount of flow. Proper lubricant selection depends on the type of gear, reduction ratio, and input power. In addition to oil level, the lubricant must be regulated for the size and shape of gears. If not, the lubricant should be changed.
Lack of proper lubrication reduces the strength of other gears. Improper maintenance reduces the life of the transmission. Whether the transmission is overloaded or undersized, excessive vibration can damage the gear. If it is not properly lubricated, it can be damaged beyond repair. Then, the need for replacement gears may arise. However, it is not a time to waste a lot of money and time on repairs.


editor by czh 2023-02-17
China RV Worm Gearbox Servo Motor dual cycloidal gearbox
Product Description
HangZhou Sihai Equipment Co., Ltd.has been specialising in the manufacture and export of RV collection worm gearboxes and other energy transmission merchandise for many years, dedicated to offer to our clients great top quality merchandise in competitive costs. The primary merchandise are RV collection worm gear speed reducers, UD series mechanical velocity variators, G3 sequence helical geared motors and the specifically developed reducers for polishing machines. Our items are extensively used in the mechanical apparatus for foodstuff, ceramics, package deal, chemical, printing, and plastics, and so forth.
Xihu (West Lake) Dis.d by the notion, “Top quality is the very important.”. the business proceeds in strict high quality control to all the items, complying with the demands of ISO9001:2008, and certificated, which has enabled our goods to have loved the effective income, recognition and good popularity amongst the marketplaces of Europe, Mid-east, and Souteast Asia..
Innovation, great high quality, customers’ satisfication, and outstanding services are the concepts of the firm. All customers at residence and overseas are warmly welcome to make contact with us and negotiate for mutual company expansion.
|
US $50 / Piece | |
1 Piece (Min. Order) |
###
|
Shipping Cost:
Estimated freight per unit. |
To be negotiated| Freight Cost Calculator |
|---|
###
| Application: | Motor, Electric Cars, Motorcycle, Machinery, Marine, Toy, Agricultural Machinery, Car |
|---|---|
| Function: | Distribution Power, Clutch, Change Drive Torque, Change Drive Direction, Speed Changing, Speed Reduction, Speed Increase |
| Layout: | Cycloidal |
###
| Customization: |
Available
|
|---|
|
US $50 / Piece | |
1 Piece (Min. Order) |
###
|
Shipping Cost:
Estimated freight per unit. |
To be negotiated| Freight Cost Calculator |
|---|
###
| Application: | Motor, Electric Cars, Motorcycle, Machinery, Marine, Toy, Agricultural Machinery, Car |
|---|---|
| Function: | Distribution Power, Clutch, Change Drive Torque, Change Drive Direction, Speed Changing, Speed Reduction, Speed Increase |
| Layout: | Cycloidal |
###
| Customization: |
Available
|
|---|
The Advantages of Using a Cyclone Gearbox
Using a cycloidal gearbox to drive an input shaft is a very effective way to reduce the speed of a machine. It does this by reducing the speed of the input shaft by a predetermined ratio. It is capable of very high ratios in relatively small sizes.
Transmission ratio
Whether you’re building a marine propulsion system or a pump for the oil and gas industry, there are certain advantages to using cycloidal gearboxes. Compared to other gearbox types, they’re shorter and have better torque density. These gearboxes also offer the best weight and positioning accuracy.
The basic design of a cycloidal gearbox is similar to that of a planetary gearbox. The main difference is in the profile of the gear teeth.
Cycloid gears have less tooth flank wear and lower Hertzian contact stress. They also have lower friction and torsional stiffness. These advantages make them ideal for applications that involve heavy loads or high-speed drives. They’re also good for high gear ratios.
In a cycloidal gearbox, the input shaft drives an eccentric bearing, while the output shaft drives the cycloidal disc. The cycloidal disc rotates around a fixed ring, and the pins of the ring gear engage the holes in the disc. The pins then drive the output shaft as the disc rotates.
Cycloid gears are ideal for applications that require high gear ratios and low friction. They’re also good for applications that require high torsional stiffness and shock load resistance. They’re also suitable for applications that require a compact design and low backlash.
The transmission ratio of a cycloidal gearbox is determined by the number of lobes on the cycloidal disc. The n=n design of the cycloidal disc moves one lobe per revolution of the input shaft.
Cycloid gears can be manufactured to reduce the gear ratio from 30:1 to 300:1. These gears are suitable for high-end applications, especially in the automation industry. They also offer the best positioning accuracy and backlash. However, they require special manufacturing processes and require non-standard characteristics.
Compressive force
Compared with conventional gearboxes, the cycloidal gearbox has a unique set of kinematics. It has an eccentric bearing in a rotating frame, which drives the cycloidal disc. It is characterized by low backlash and torsional stiffness, which enables geared motion.
In this study, the effects of design parameters were investigated to develop the optimal design of a cycloidal reducer. Three main rolling nodes were studied: a cycloidal disc, an outer race and the input shaft. These were used to analyze the motion related dynamic forces, which can be used to calculate stresses and strains. The gear mesh frequency was calculated using a formula, which incorporated a correction factor for the rotating frame of the outer race.
A three-dimensional finite element analysis (FEA) study was conducted to evaluate the cycloidal disc. The effects of the size of the holes on the disc’s induced stresses were investigated. The study also looked at the torque ripple of a cycloidal drive.
The authors of this study also explored backlash distribution in the output mechanism, which took into account the machining deviations and structure and geometry of the output mechanism. The study also looked at the relative efficiency of a cycloidal reducer, which was based on a single disc cycloidal reducer with a one-tooth difference.
The authors of this study were able to deduce the contact stress of the cycloidal disc, which is calculated using the material-based contact stiffness. This can be used to determine accurate contact stresses in a cycloidal gearbox.
It is important to know the ratios needed for calculation of the bearing rate. This can be calculated using the formula f = k (S x R) where S is the volume of the element, R is the mass, k is the contact stiffness and f is the force vector.
Rotational direction
Unlike the conventional ring gear which has a single axis of rotation, cycloidal gearbox has three rotational axes which are parallel and are located in a single plane. A cycloidal gearbox has excellent torsional stiffness and shock load capacity. It also ensures constant angular velocity, and is used in high-speed gearbox applications.
A cycloidal gearbox consists of an input shaft, a drive member and a cycloidal disc. The disc rotates in one direction, while the input shaft rotates in the opposite direction. The input shaft eccentrically mounts to the drive member. The cycloidal disc meshes with the ring-gear housing, and the rotational motion of the cycloidal disc is transferred to the output shaft.
To calculate the rotational direction of a cycloidal gearbox, the cycloid must have the correct angular orientation and the centerline of the cycloid should be aligned with the center of the output hole. The cycloid’s shortest length should be equal to the radius of the pin circle. The cycloid’s largest radius should be the size of the bearing’s exterior diameter.
A single-stage gear will not have much space to work with, so you’ll need a multistage gear to maximize space. This is also the reason that cycloid gears are usually designed with a shortened cycloid.
To calculate the most efficient tooth profile for a cycloidal gear, a new method was devised. This method uses a mathematical model that uses the cycloid’s rotational direction and a few other geometric parameters. Using a piecewise function related to the distribution of pressure angle, the cycloid’s most efficient profile is determined. It is then superimposed on the theoretical profile. The new method is much more flexible than the conventional method, and can adapt to changing trends of the cycloidal profile.
Design
Several designs of cycloidal gearboxes have been developed. These gearboxes have a large reduction ratio in one stage. They are mainly used for heavy machines. They provide good torsional stiffness and shock load capacity. However, they also have vibrations at high RPM. Several studies have been conducted to find a solution to this problem.
A cycloidal gearbox is designed by calculating the reduction ratio of a mechanism. This ratio is obtained by the size of the input speed. This is then multiplied by the reduction ratio of the gear profile.
The most important factor in the design of a cycloidal gearbox is the load distribution along the width of the gear. Using this as a design criterion, the amplitude of vibration can be reduced. This will ensure that the gearbox is working properly. In order to generate proper mating conditions, the trochoidal profile on the cycloidal disc periphery must be defined accurately.
One of the most common forms of cycloidal gears is circular arc toothing. This is the most common type of toothing used today.
Another form of gear is the hypocycloid. This form requires the rolling circle diameter to be equal to half the base circle diameter. Another special case is the point tooth form. This form is also called clock toothing.
In order to make this gear profile work, the initial point of contact must remain fixed to the edge of the rolling disk. This will generate the hypocycloid curve. The curve is traced from this initial point.
To investigate this gear profile, the authors used a 3D finite element analysis. They used the mathematical model of gear manufacturing that included kinematics parameters, output moment calculations, and machining steps. The resulting design eliminated backlash.
Sizing and selection
Choosing a gearbox can be a complex task. There are many factors that need to be taken into account. You need to determine the type of application, the required speed, the load, and the ratio of the gearbox. By gaining this information, you can find a solution that works best for you.
The first thing you need to do is find the proper size. There are several sizing programs available to help you determine the best gearbox for your application. You can start by drawing a cycloidal gear to help you create the part.
During sizing, it is important to consider the environment. Shock loads, environmental conditions, and ambient temperatures can increase wear on the gear teeth. The temperature also has a significant impact on lubrication viscosities and seal materials.
You also need to consider the input and output speed. This is because the input speed will change your gearbox ratio calculations. If you exceed the input speed, you can damage the seals and cause premature wear on the shaft bearings.
Another important aspect of sizing is the service factor. This factor determines the amount of torque the gearbox can handle. The service factor can be as low as 1.4, which is sufficient for most industrial applications. However, high shock loads and impact loads will require higher service factors. Failure to account for these factors can lead to broken shafts and damaged bearings.
The output style is also important. You need to determine if you want a keyless or keyed hollow bore, as well as if you need an output flange. If you choose a keyless hollow bore, you will need to select a seal material that can withstand the higher temperatures.
editor by czh 2022-12-25
China Pl120 Servo Planetary Gearbox supplier
Product Description
1. PL series precision planetary gear speed reducer Model: PL40, PL60, PL90, PL120, PL160, PL200
2. The speed ratio: 3, 4, 5, 7, 9, 10, 15, 20, 25, 30, 35, 40, 50, 64, 70, 80, 100, 150, 200, 250, 350, 400, 500, 700, 1000
3. Stages: Three
Performance and features:
1. Planetary gear transmission interface using doesn’t contain full needle needle bearing, and increase the contact area to improve structural rigidity and output torque;
2. PL series precision planetary gear reducer, with high precision, high rigidity, high load, high efficiency, high speed ratio, high life, low inertia, low vibration, low noise, low temperature rising, beautiful appearance, structure, light weight, easy installation, accurate positioning, etc, and is suitable for AC servo motor, DC servo motor, stepper motor, hydraulic motor of growth and slow down transmission
| Type | PL-40 | PL-60 | PL-90 | PL-120 | PL-160 | PL-200 | Ratio | Stages | |
| T2N Rated output torque (Nm) |
10 | 28 | 120 | 220 | 480 | 1230 | 3 | 1 | |
| 15 | 48 | 150 | 270 | 590 | 1780 | 4 | |||
| 15 | 48 | 150 | 270 | 590 | 1345 | 5 | |||
| 9 | 39 | 110 | 215 | 470 | 745 | 7 | |||
| 7 | 19 | 58 | 98 | 260 | 720 | 10 | |||
| 10 | 28 | 120 | 220 | 480 | 1230 | 9 | 2 | ||
| 15 | 48 | 150 | 270 | 590 | 1485 | 15 | |||
| 15 | 48 | 150 | 270 | 590 | 2035 | 20 | |||
| 15 | 48 | 150 | 270 | 590 | 1485 | 25 | |||
| 15 | 48 | 150 | 270 | 590 | 2035 | 30 | |||
| 15 | 48 | 150 | 270 | 590 | 1450 | 35 | |||
| 15 | 48 | 150 | 270 | 590 | 1485 | 40 | |||
| 15 | 48 | 150 | 270 | 590 | 1450 | 50 | |||
| 9 | 39 | 110 | 215 | 470 | 840 | 70 | |||
| 7 | 19 | 58 | 98 | 260 | 720 | 100 | |||
| 15 | 48 | 150 | 270 | 590 | 2590 | 64 | 3 | ||
| 15 | 48 | 150 | 270 | 590 | 2590 | 80 | |||
| 15 | 48 | 150 | 270 | 590 | 2590 | 100 | |||
| 15 | 48 | 150 | 270 | 590 | 2590 | 150 | |||
| 15 | 48 | 150 | 270 | 590 | 1855 | 200 | |||
| 15 | 48 | 150 | 270 | 590 | 2596 | 250 | |||
| 15 | 48 | 150 | 270 | 590 | 1855 | 350 | |||
| 15 | 48 | 150 | 270 | 590 | 1450 | 400 | |||
| 15 | 48 | 150 | 270 | 590 | 1070 | 500 | |||
| 9 | 39 | 110 | 215 | 470 | 1070 | 700 | |||
| 7 | 19 | 58 | 98 | 260 | 1070 | 1000 | |||
| emergency stop torque | T2not=2T2N | ||||||||
| Rotational inertia (kgm2) |
0.031 | 0.0135 | 0.77 | 2.63 | 12.14 | 15.6 | 3 | 1 | |
| 0.571 | 0.093 | 0.52 | 1.79 | 7.78 | 16.3 | 4 | |||
| 0.019 | 0.078 | 0.45 | 1.53 | 6.07 | 15.4 | 5 | |||
| 0.017 | 0.065 | 0.39 | 1.32 | 4.63 | 16.1 | 7 | |||
| 0.016 | 0.065 | 0.39 | 1.32 | 4.63 | 15.2 | 10 | |||
| 0.03 | 0.131 | 0.74 | 2.62 | 12.14 | 15.9 | 9 | 2 | ||
| 0.571 | 0.077 | 0.71 | 2.53 | 12.35 | 15 | 15 | |||
| 0.019 | 0.075 | 0.44 | 1.5 | 6.65 | 15.7 | 20 | |||
| 0.019 | 0.075 | 0.44 | 1.49 | 5.81 | 15.3 | 25 | |||
| 0.017 | 0.064 | 0.39 | 1.3 | 6.36 | 15.2 | 30 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.28 | 16.1 | 35 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.28 | 15.2 | 40 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 4.5 | 15.2 | 50 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 4.5 | 15.2 | 70 | |||
| 0.016 | 0.058 | 0.31 | 1.12 | 3.53 | 15.2 | 100 | |||
| 0.019 | 0.075 | 0.5 | 1.5 | 7.5 | 15.4 | 80 | 3 | ||
| 0.019 | 0.075 | 0.44 | 1.49 | 7.4 | 15.4 | 100 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 6.5 | 15.2 | 150 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 6.2 | 15.2 | 200 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.7 | 15.2 | 250 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.4 | 15.2 | 350 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.4 | 15.2 | 400 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.2 | 15.2 | 500 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.2 | 15.2 | 700 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.2 | 15.2 | 1000 | |||
| backslash (arcmin) |
reduced | <5 | <3 | <3 | <3 | <5 | <10 | 1 | |
| standard | <10 | <8 | <8 | <8 | <10 | <15 | |||
| reduced | <8 | <5 | <5 | <5 | <8 | <15 | 2 | ||
| standard | <12 | <10 | <10 | <10 | <10 | <18 | |||
| reduced | <10 | <8 | <8 | <8 | <10 | <18 | 3 | ||
| standard | <15 | <12 | <12 | <12 | <15 | <22 | |||
| torsional rigidity (Nm/arcmin) |
0.7 | 1.8 | 4.4 | 9.2 | 26.7 | 66.7 | |||
| noise dB(A) | 55 | 58 | 60 | 65 | 70 | 75 | |||
| Max.input speed | 10000 | 8000 | 6000 | 6000 | 5000 | 3500 | 1-min | ||
| Rated input speed | 4500 | 4000 | 4000 | 3500 | 2000 | 1500 | 1-min | ||
| Max.Radialforce(N) | 185 | 265 | 400 | 1240 | 3700 | 6700 | Stages | ||
| Max.Axialforce(N) | 150 | 200 | 420 | 1000 | 3500 | 3800 | |||
| Full-load efficiency(%) | 96 | 1 | |||||||
| 94 | 2 | ||||||||
| 90 | 3 | ||||||||
| service life (H) | 20000 | ||||||||
| Weight (Kg) | 0.5 | 1 | 3 | 6.2 | 19 | 42 | 1 | ||
| 0.8 | 1.5 | 4.2 | 8 | 24 | 50 | 2 | |||
| 1.1 | 1.8 | 4.8 | 9.8 | 29 | 58 | 3 | |||
|
US $200-2,000 / unit | |
1 unit (Min. Order) |
###
| Application: | Machinery |
|---|---|
| Layout: | Cycloidal |
| Hardness: | Hardened Tooth Surface |
| Installation: | Vertical Type |
| Step: | Double-Step |
| Type: | Planetary Gear Box |
###
| Customization: |
Available
|
|---|
###
| Type | PL-40 | PL-60 | PL-90 | PL-120 | PL-160 | PL-200 | Ratio | Stages | |
| T2N Rated output torque (Nm) |
10 | 28 | 120 | 220 | 480 | 1230 | 3 | 1 | |
| 15 | 48 | 150 | 270 | 590 | 1780 | 4 | |||
| 15 | 48 | 150 | 270 | 590 | 1345 | 5 | |||
| 9 | 39 | 110 | 215 | 470 | 745 | 7 | |||
| 7 | 19 | 58 | 98 | 260 | 720 | 10 | |||
| 10 | 28 | 120 | 220 | 480 | 1230 | 9 | 2 | ||
| 15 | 48 | 150 | 270 | 590 | 1485 | 15 | |||
| 15 | 48 | 150 | 270 | 590 | 2035 | 20 | |||
| 15 | 48 | 150 | 270 | 590 | 1485 | 25 | |||
| 15 | 48 | 150 | 270 | 590 | 2035 | 30 | |||
| 15 | 48 | 150 | 270 | 590 | 1450 | 35 | |||
| 15 | 48 | 150 | 270 | 590 | 1485 | 40 | |||
| 15 | 48 | 150 | 270 | 590 | 1450 | 50 | |||
| 9 | 39 | 110 | 215 | 470 | 840 | 70 | |||
| 7 | 19 | 58 | 98 | 260 | 720 | 100 | |||
| 15 | 48 | 150 | 270 | 590 | 2590 | 64 | 3 | ||
| 15 | 48 | 150 | 270 | 590 | 2590 | 80 | |||
| 15 | 48 | 150 | 270 | 590 | 2590 | 100 | |||
| 15 | 48 | 150 | 270 | 590 | 2590 | 150 | |||
| 15 | 48 | 150 | 270 | 590 | 1855 | 200 | |||
| 15 | 48 | 150 | 270 | 590 | 2596 | 250 | |||
| 15 | 48 | 150 | 270 | 590 | 1855 | 350 | |||
| 15 | 48 | 150 | 270 | 590 | 1450 | 400 | |||
| 15 | 48 | 150 | 270 | 590 | 1070 | 500 | |||
| 9 | 39 | 110 | 215 | 470 | 1070 | 700 | |||
| 7 | 19 | 58 | 98 | 260 | 1070 | 1000 | |||
| emergency stop torque | T2not=2T2N | ||||||||
| Rotational inertia (kgm2) |
0.031 | 0.0135 | 0.77 | 2.63 | 12.14 | 15.6 | 3 | 1 | |
| 0.022 | 0.093 | 0.52 | 1.79 | 7.78 | 16.3 | 4 | |||
| 0.019 | 0.078 | 0.45 | 1.53 | 6.07 | 15.4 | 5 | |||
| 0.017 | 0.065 | 0.39 | 1.32 | 4.63 | 16.1 | 7 | |||
| 0.016 | 0.065 | 0.39 | 1.32 | 4.63 | 15.2 | 10 | |||
| 0.03 | 0.131 | 0.74 | 2.62 | 12.14 | 15.9 | 9 | 2 | ||
| 0.023 | 0.077 | 0.71 | 2.53 | 12.35 | 15 | 15 | |||
| 0.019 | 0.075 | 0.44 | 1.5 | 6.65 | 15.7 | 20 | |||
| 0.019 | 0.075 | 0.44 | 1.49 | 5.81 | 15.3 | 25 | |||
| 0.017 | 0.064 | 0.39 | 1.3 | 6.36 | 15.2 | 30 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.28 | 16.1 | 35 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.28 | 15.2 | 40 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 4.5 | 15.2 | 50 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 4.5 | 15.2 | 70 | |||
| 0.016 | 0.058 | 0.31 | 1.12 | 3.53 | 15.2 | 100 | |||
| 0.019 | 0.075 | 0.5 | 1.5 | 7.5 | 15.4 | 80 | 3 | ||
| 0.019 | 0.075 | 0.44 | 1.49 | 7.4 | 15.4 | 100 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 6.5 | 15.2 | 150 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 6.2 | 15.2 | 200 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.7 | 15.2 | 250 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.4 | 15.2 | 350 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.4 | 15.2 | 400 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.2 | 15.2 | 500 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.2 | 15.2 | 700 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.2 | 15.2 | 1000 | |||
| backslash (arcmin) |
reduced | <5 | <3 | <3 | <3 | <5 | <10 | 1 | |
| standard | <10 | <8 | <8 | <8 | <10 | <15 | |||
| reduced | <8 | <5 | <5 | <5 | <8 | <15 | 2 | ||
| standard | <12 | <10 | <10 | <10 | <10 | <18 | |||
| reduced | <10 | <8 | <8 | <8 | <10 | <18 | 3 | ||
| standard | <15 | <12 | <12 | <12 | <15 | <22 | |||
| torsional rigidity (Nm/arcmin) |
0.7 | 1.8 | 4.4 | 9.2 | 26.7 | 66.7 | |||
| noise dB(A) | 55 | 58 | 60 | 65 | 70 | 75 | |||
| Max.input speed | 10000 | 8000 | 6000 | 6000 | 5000 | 3500 | 1-min | ||
| Rated input speed | 4500 | 4000 | 4000 | 3500 | 2000 | 1500 | 1-min | ||
| Max.Radialforce(N) | 185 | 265 | 400 | 1240 | 3700 | 6700 | Stages | ||
| Max.Axialforce(N) | 150 | 200 | 420 | 1000 | 3500 | 3800 | |||
| Full-load efficiency(%) | 96 | 1 | |||||||
| 94 | 2 | ||||||||
| 90 | 3 | ||||||||
| service life (H) | 20000 | ||||||||
| Weight (Kg) | 0.5 | 1 | 3 | 6.2 | 19 | 42 | 1 | ||
| 0.8 | 1.5 | 4.2 | 8 | 24 | 50 | 2 | |||
| 1.1 | 1.8 | 4.8 | 9.8 | 29 | 58 | 3 | |||
|
US $200-2,000 / unit | |
1 unit (Min. Order) |
###
| Application: | Machinery |
|---|---|
| Layout: | Cycloidal |
| Hardness: | Hardened Tooth Surface |
| Installation: | Vertical Type |
| Step: | Double-Step |
| Type: | Planetary Gear Box |
###
| Customization: |
Available
|
|---|
###
| Type | PL-40 | PL-60 | PL-90 | PL-120 | PL-160 | PL-200 | Ratio | Stages | |
| T2N Rated output torque (Nm) |
10 | 28 | 120 | 220 | 480 | 1230 | 3 | 1 | |
| 15 | 48 | 150 | 270 | 590 | 1780 | 4 | |||
| 15 | 48 | 150 | 270 | 590 | 1345 | 5 | |||
| 9 | 39 | 110 | 215 | 470 | 745 | 7 | |||
| 7 | 19 | 58 | 98 | 260 | 720 | 10 | |||
| 10 | 28 | 120 | 220 | 480 | 1230 | 9 | 2 | ||
| 15 | 48 | 150 | 270 | 590 | 1485 | 15 | |||
| 15 | 48 | 150 | 270 | 590 | 2035 | 20 | |||
| 15 | 48 | 150 | 270 | 590 | 1485 | 25 | |||
| 15 | 48 | 150 | 270 | 590 | 2035 | 30 | |||
| 15 | 48 | 150 | 270 | 590 | 1450 | 35 | |||
| 15 | 48 | 150 | 270 | 590 | 1485 | 40 | |||
| 15 | 48 | 150 | 270 | 590 | 1450 | 50 | |||
| 9 | 39 | 110 | 215 | 470 | 840 | 70 | |||
| 7 | 19 | 58 | 98 | 260 | 720 | 100 | |||
| 15 | 48 | 150 | 270 | 590 | 2590 | 64 | 3 | ||
| 15 | 48 | 150 | 270 | 590 | 2590 | 80 | |||
| 15 | 48 | 150 | 270 | 590 | 2590 | 100 | |||
| 15 | 48 | 150 | 270 | 590 | 2590 | 150 | |||
| 15 | 48 | 150 | 270 | 590 | 1855 | 200 | |||
| 15 | 48 | 150 | 270 | 590 | 2596 | 250 | |||
| 15 | 48 | 150 | 270 | 590 | 1855 | 350 | |||
| 15 | 48 | 150 | 270 | 590 | 1450 | 400 | |||
| 15 | 48 | 150 | 270 | 590 | 1070 | 500 | |||
| 9 | 39 | 110 | 215 | 470 | 1070 | 700 | |||
| 7 | 19 | 58 | 98 | 260 | 1070 | 1000 | |||
| emergency stop torque | T2not=2T2N | ||||||||
| Rotational inertia (kgm2) |
0.031 | 0.0135 | 0.77 | 2.63 | 12.14 | 15.6 | 3 | 1 | |
| 0.022 | 0.093 | 0.52 | 1.79 | 7.78 | 16.3 | 4 | |||
| 0.019 | 0.078 | 0.45 | 1.53 | 6.07 | 15.4 | 5 | |||
| 0.017 | 0.065 | 0.39 | 1.32 | 4.63 | 16.1 | 7 | |||
| 0.016 | 0.065 | 0.39 | 1.32 | 4.63 | 15.2 | 10 | |||
| 0.03 | 0.131 | 0.74 | 2.62 | 12.14 | 15.9 | 9 | 2 | ||
| 0.023 | 0.077 | 0.71 | 2.53 | 12.35 | 15 | 15 | |||
| 0.019 | 0.075 | 0.44 | 1.5 | 6.65 | 15.7 | 20 | |||
| 0.019 | 0.075 | 0.44 | 1.49 | 5.81 | 15.3 | 25 | |||
| 0.017 | 0.064 | 0.39 | 1.3 | 6.36 | 15.2 | 30 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.28 | 16.1 | 35 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.28 | 15.2 | 40 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 4.5 | 15.2 | 50 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 4.5 | 15.2 | 70 | |||
| 0.016 | 0.058 | 0.31 | 1.12 | 3.53 | 15.2 | 100 | |||
| 0.019 | 0.075 | 0.5 | 1.5 | 7.5 | 15.4 | 80 | 3 | ||
| 0.019 | 0.075 | 0.44 | 1.49 | 7.4 | 15.4 | 100 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 6.5 | 15.2 | 150 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 6.2 | 15.2 | 200 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.7 | 15.2 | 250 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.4 | 15.2 | 350 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.4 | 15.2 | 400 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.2 | 15.2 | 500 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.2 | 15.2 | 700 | |||
| 0.016 | 0.064 | 0.39 | 1.3 | 5.2 | 15.2 | 1000 | |||
| backslash (arcmin) |
reduced | <5 | <3 | <3 | <3 | <5 | <10 | 1 | |
| standard | <10 | <8 | <8 | <8 | <10 | <15 | |||
| reduced | <8 | <5 | <5 | <5 | <8 | <15 | 2 | ||
| standard | <12 | <10 | <10 | <10 | <10 | <18 | |||
| reduced | <10 | <8 | <8 | <8 | <10 | <18 | 3 | ||
| standard | <15 | <12 | <12 | <12 | <15 | <22 | |||
| torsional rigidity (Nm/arcmin) |
0.7 | 1.8 | 4.4 | 9.2 | 26.7 | 66.7 | |||
| noise dB(A) | 55 | 58 | 60 | 65 | 70 | 75 | |||
| Max.input speed | 10000 | 8000 | 6000 | 6000 | 5000 | 3500 | 1-min | ||
| Rated input speed | 4500 | 4000 | 4000 | 3500 | 2000 | 1500 | 1-min | ||
| Max.Radialforce(N) | 185 | 265 | 400 | 1240 | 3700 | 6700 | Stages | ||
| Max.Axialforce(N) | 150 | 200 | 420 | 1000 | 3500 | 3800 | |||
| Full-load efficiency(%) | 96 | 1 | |||||||
| 94 | 2 | ||||||||
| 90 | 3 | ||||||||
| service life (H) | 20000 | ||||||||
| Weight (Kg) | 0.5 | 1 | 3 | 6.2 | 19 | 42 | 1 | ||
| 0.8 | 1.5 | 4.2 | 8 | 24 | 50 | 2 | |||
| 1.1 | 1.8 | 4.8 | 9.8 | 29 | 58 | 3 | |||
The Advantages of Using a Cyclone Gearbox
Using a cycloidal gearbox to drive an input shaft is a very effective way to reduce the speed of a machine. It does this by reducing the speed of the input shaft by a predetermined ratio. It is capable of very high ratios in relatively small sizes.
Transmission ratio
Whether you’re building a marine propulsion system or a pump for the oil and gas industry, there are certain advantages to using cycloidal gearboxes. Compared to other gearbox types, they’re shorter and have better torque density. These gearboxes also offer the best weight and positioning accuracy.
The basic design of a cycloidal gearbox is similar to that of a planetary gearbox. The main difference is in the profile of the gear teeth.
Cycloid gears have less tooth flank wear and lower Hertzian contact stress. They also have lower friction and torsional stiffness. These advantages make them ideal for applications that involve heavy loads or high-speed drives. They’re also good for high gear ratios.
In a cycloidal gearbox, the input shaft drives an eccentric bearing, while the output shaft drives the cycloidal disc. The cycloidal disc rotates around a fixed ring, and the pins of the ring gear engage the holes in the disc. The pins then drive the output shaft as the disc rotates.
Cycloid gears are ideal for applications that require high gear ratios and low friction. They’re also good for applications that require high torsional stiffness and shock load resistance. They’re also suitable for applications that require a compact design and low backlash.
The transmission ratio of a cycloidal gearbox is determined by the number of lobes on the cycloidal disc. The n=n design of the cycloidal disc moves one lobe per revolution of the input shaft.
Cycloid gears can be manufactured to reduce the gear ratio from 30:1 to 300:1. These gears are suitable for high-end applications, especially in the automation industry. They also offer the best positioning accuracy and backlash. However, they require special manufacturing processes and require non-standard characteristics.
Compressive force
Compared with conventional gearboxes, the cycloidal gearbox has a unique set of kinematics. It has an eccentric bearing in a rotating frame, which drives the cycloidal disc. It is characterized by low backlash and torsional stiffness, which enables geared motion.
In this study, the effects of design parameters were investigated to develop the optimal design of a cycloidal reducer. Three main rolling nodes were studied: a cycloidal disc, an outer race and the input shaft. These were used to analyze the motion related dynamic forces, which can be used to calculate stresses and strains. The gear mesh frequency was calculated using a formula, which incorporated a correction factor for the rotating frame of the outer race.
A three-dimensional finite element analysis (FEA) study was conducted to evaluate the cycloidal disc. The effects of the size of the holes on the disc’s induced stresses were investigated. The study also looked at the torque ripple of a cycloidal drive.
The authors of this study also explored backlash distribution in the output mechanism, which took into account the machining deviations and structure and geometry of the output mechanism. The study also looked at the relative efficiency of a cycloidal reducer, which was based on a single disc cycloidal reducer with a one-tooth difference.
The authors of this study were able to deduce the contact stress of the cycloidal disc, which is calculated using the material-based contact stiffness. This can be used to determine accurate contact stresses in a cycloidal gearbox.
It is important to know the ratios needed for calculation of the bearing rate. This can be calculated using the formula f = k (S x R) where S is the volume of the element, R is the mass, k is the contact stiffness and f is the force vector.
Rotational direction
Unlike the conventional ring gear which has a single axis of rotation, cycloidal gearbox has three rotational axes which are parallel and are located in a single plane. A cycloidal gearbox has excellent torsional stiffness and shock load capacity. It also ensures constant angular velocity, and is used in high-speed gearbox applications.
A cycloidal gearbox consists of an input shaft, a drive member and a cycloidal disc. The disc rotates in one direction, while the input shaft rotates in the opposite direction. The input shaft eccentrically mounts to the drive member. The cycloidal disc meshes with the ring-gear housing, and the rotational motion of the cycloidal disc is transferred to the output shaft.
To calculate the rotational direction of a cycloidal gearbox, the cycloid must have the correct angular orientation and the centerline of the cycloid should be aligned with the center of the output hole. The cycloid’s shortest length should be equal to the radius of the pin circle. The cycloid’s largest radius should be the size of the bearing’s exterior diameter.
A single-stage gear will not have much space to work with, so you’ll need a multistage gear to maximize space. This is also the reason that cycloid gears are usually designed with a shortened cycloid.
To calculate the most efficient tooth profile for a cycloidal gear, a new method was devised. This method uses a mathematical model that uses the cycloid’s rotational direction and a few other geometric parameters. Using a piecewise function related to the distribution of pressure angle, the cycloid’s most efficient profile is determined. It is then superimposed on the theoretical profile. The new method is much more flexible than the conventional method, and can adapt to changing trends of the cycloidal profile.
Design
Several designs of cycloidal gearboxes have been developed. These gearboxes have a large reduction ratio in one stage. They are mainly used for heavy machines. They provide good torsional stiffness and shock load capacity. However, they also have vibrations at high RPM. Several studies have been conducted to find a solution to this problem.
A cycloidal gearbox is designed by calculating the reduction ratio of a mechanism. This ratio is obtained by the size of the input speed. This is then multiplied by the reduction ratio of the gear profile.
The most important factor in the design of a cycloidal gearbox is the load distribution along the width of the gear. Using this as a design criterion, the amplitude of vibration can be reduced. This will ensure that the gearbox is working properly. In order to generate proper mating conditions, the trochoidal profile on the cycloidal disc periphery must be defined accurately.
One of the most common forms of cycloidal gears is circular arc toothing. This is the most common type of toothing used today.
Another form of gear is the hypocycloid. This form requires the rolling circle diameter to be equal to half the base circle diameter. Another special case is the point tooth form. This form is also called clock toothing.
In order to make this gear profile work, the initial point of contact must remain fixed to the edge of the rolling disk. This will generate the hypocycloid curve. The curve is traced from this initial point.
To investigate this gear profile, the authors used a 3D finite element analysis. They used the mathematical model of gear manufacturing that included kinematics parameters, output moment calculations, and machining steps. The resulting design eliminated backlash.
Sizing and selection
Choosing a gearbox can be a complex task. There are many factors that need to be taken into account. You need to determine the type of application, the required speed, the load, and the ratio of the gearbox. By gaining this information, you can find a solution that works best for you.
The first thing you need to do is find the proper size. There are several sizing programs available to help you determine the best gearbox for your application. You can start by drawing a cycloidal gear to help you create the part.
During sizing, it is important to consider the environment. Shock loads, environmental conditions, and ambient temperatures can increase wear on the gear teeth. The temperature also has a significant impact on lubrication viscosities and seal materials.
You also need to consider the input and output speed. This is because the input speed will change your gearbox ratio calculations. If you exceed the input speed, you can damage the seals and cause premature wear on the shaft bearings.
Another important aspect of sizing is the service factor. This factor determines the amount of torque the gearbox can handle. The service factor can be as low as 1.4, which is sufficient for most industrial applications. However, high shock loads and impact loads will require higher service factors. Failure to account for these factors can lead to broken shafts and damaged bearings.
The output style is also important. You need to determine if you want a keyless or keyed hollow bore, as well as if you need an output flange. If you choose a keyless hollow bore, you will need to select a seal material that can withstand the higher temperatures.
editor by czh 2022-12-12